直线驱动优势
性能
- 无需运动转换
- 驱动系统不存在因传动或耦合元件引起的弹性、齿隙、摩擦和迟滞。
- 紧凑型电机
- 得益于大的进给力与相对低的加速质量,可实现极高的加速性能。从速度 0 到极限速度全范围均可使用。
- 直接位置测量
- 透过直接位置测量和刚度机械结构,定位过程具有高度动态性与精确性。
运营成本
- 无额外运动部件
- 驱动组件的组装、调整和维护工作大幅减少。
- 驱动系统无磨损
- 即使在高交变负载下,驱动系统也极为耐用。机器停机时间因此大幅降低。
- 高可用性
- 除了延长使用寿命和减少磨损外,线性马达的坚固性也提升了系统可用性。
- 驱动系统中的机械过载不会像齿轮电机那样造成损坏。
设计
- 紧凑的安装空间
- 紧凑的设计使驱动模组的空间需求降低。
- 零件数量少
- 成熟的设计有利于将电机零件整合到整体机器概念中。
- 更少且更坚固的零件带来低故障率(高 MTBF*)。
- 多样化设计变体
- 有助于将电机零件优化整合到整体机器设计概念中。
*MTBF:Mean Time Between Failures(平均故障间隔时间)
线性马达特性
直线驱动可在无需运动转换器或中间齿轮的情况下实现线性运动。
线性马达由动子(primary part)和定子(secondary part)组成。动子包含绕组线圈,定子为一组排列在动子对面的永久磁铁。电机类型可分为有齿槽型(slotted)、无齿槽型(slotless)和无铁芯型(ironless),以及步进电机(同步磁阻混合电机)。
电机在特定速度范围内产生均匀且典型的力。力的大小由动子和定子之间的有效气隙面积决定。
当电流施加到动子时,绕组线圈周围的电磁场产生作用于定子的力,从而产生线性运动。
线性轴系统需要合适的导引系统来维持动子与定子之间的气隙,同时需要一个线性量测系统来侦测电机的位置。
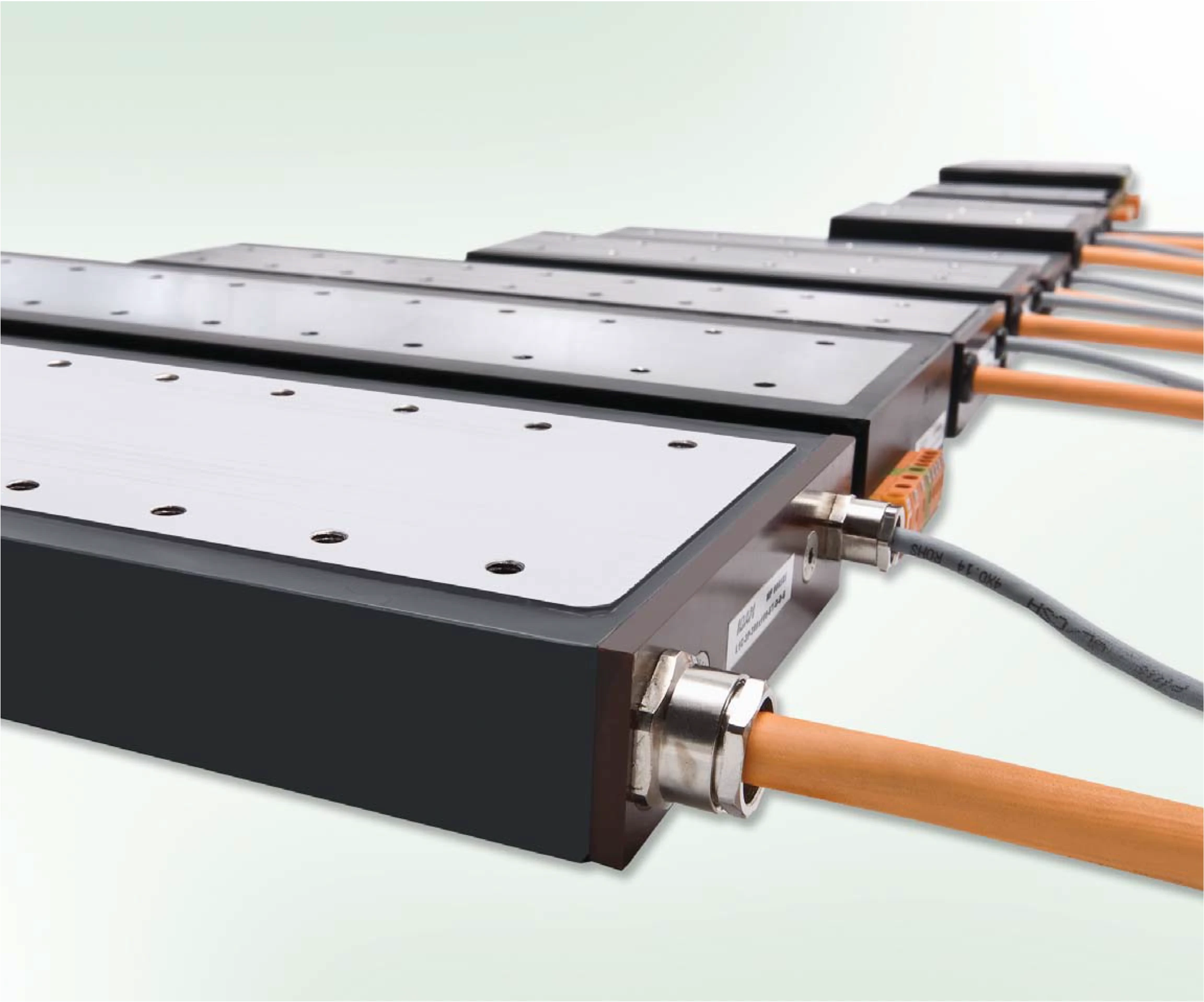
每个电机系列都包含不同长度和宽度的选择,以满足不同的力和安装需求,并提供多种安装和连接变体。
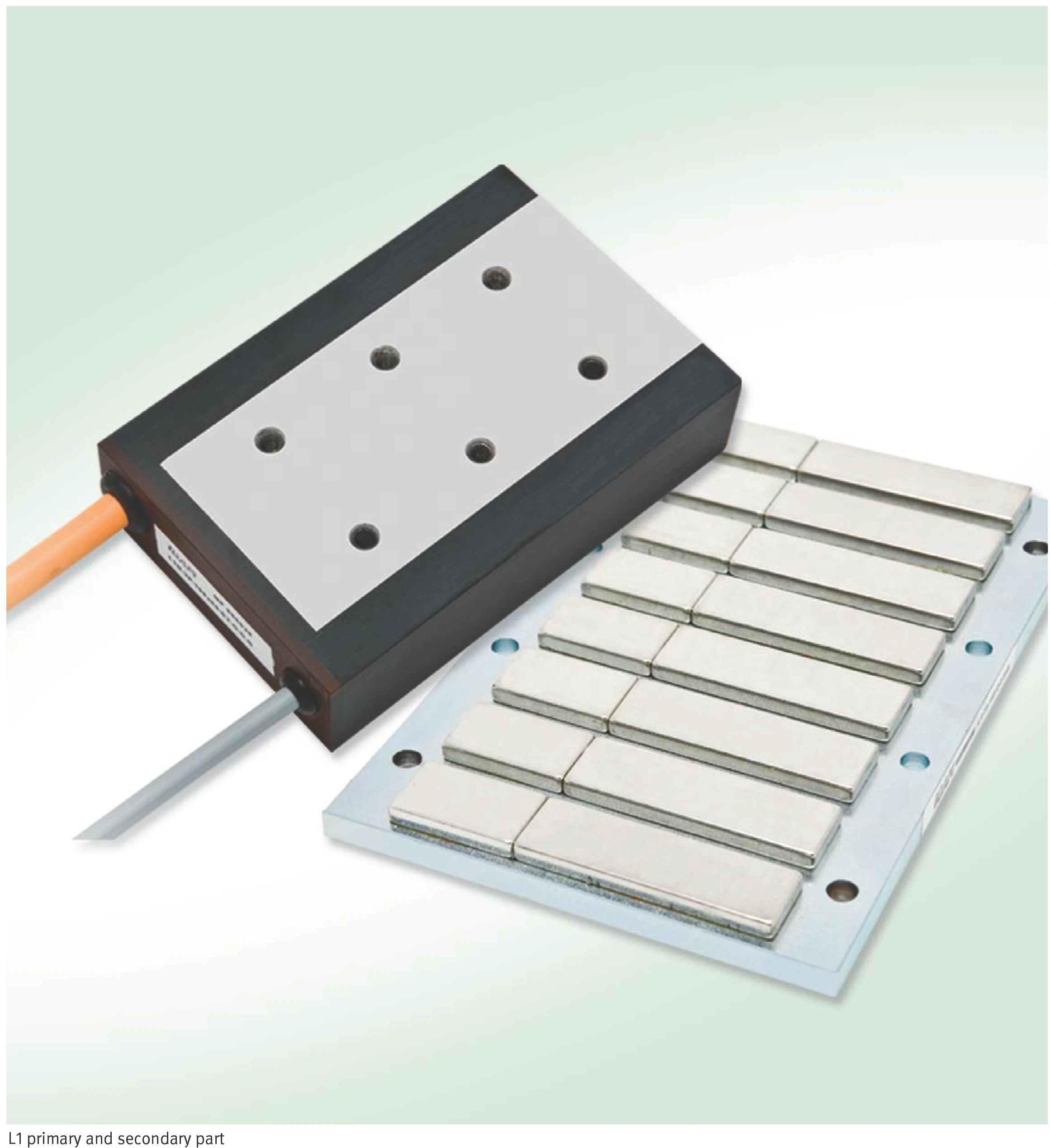
L1 线性马达:动子与定子
线性马达系列概览
有齿槽型电机(Slotted Motors)
| 电机类型 | 特性 |
|---|---|
| L1A 系列 | 峰值力高达 1010 N|极致力重比|适用于垂直安装空间有限的自动化应用 |
| L1B 系列 | 峰值力高达 1521 N|最佳化的热损耗|适用于进给力需求较高的自动化应用 |
| L1C 系列 | 峰值力高达 5171 N|最佳化的热损耗|水冷|适用于机床等应用 |
| L2U 系列 | 峰值力高达 12000 N|双齿梳结构|极致力体积比|长使用寿命 / 高动态性能|冷却选项|恒速|磁吸力中和|适用于机床等应用 |
低铁芯型电机 / 无齿槽型(Low-Iron Motors, Slotless)
| 电机类型 | 特性 |
|---|---|
| FSM 系列 | 扁平设计|最小化脉动力|高动态性能和高精度|适用于量测机台等应用 |
无铁芯型电机(Ironless Motors)
| 电机类型 | 特性 |
|---|---|
| ULIM 系列 | 优异的动态性能|恒速|紧凑设计|适用于印刷机和产品电子等应用 |
磁阻电机(Reluctance Motors)
| 电机类型 | 特性 |
|---|---|
| LRAM | 步进电机|无磨损|精密空气轴承|适用于产品电子中的取放应用|适合低质量应用 |
电机参数 — 效率准则
根据电机尺寸,力和制程中产生的功率损耗(铜损)在不同工作点上是固定的,且与绕组设计无关。由于线性马达在静止状态下不输出机械功率,在此引用效率系数并无意义。
功率损耗公式
电流转换为保持力或进给力时,会产生与负载无关电流之二次方成正比的功率损耗或加热。此关系在线性动态范围和室温下的静态工作中成立。
Pl = (F / km)2
- Pl:功率损耗 [W]
- F:力 [N]
- km:电机常数 [N/√W]
电机常数 km 可作为比较不同电机效率的方式。较高的电机常数代表力对功率损耗的转换效率更高。
km 与温度的关系
电机常数 km 取决于欧姆电阻,因此也取决于电机的绕组温度。在电机技术资料中,km 以 25 °C 为参考值。
下图显示了参考电机常数与温度之间的依赖关系:绕组温度 100 °C 时,km 约降至 25 °C 时的 88%。
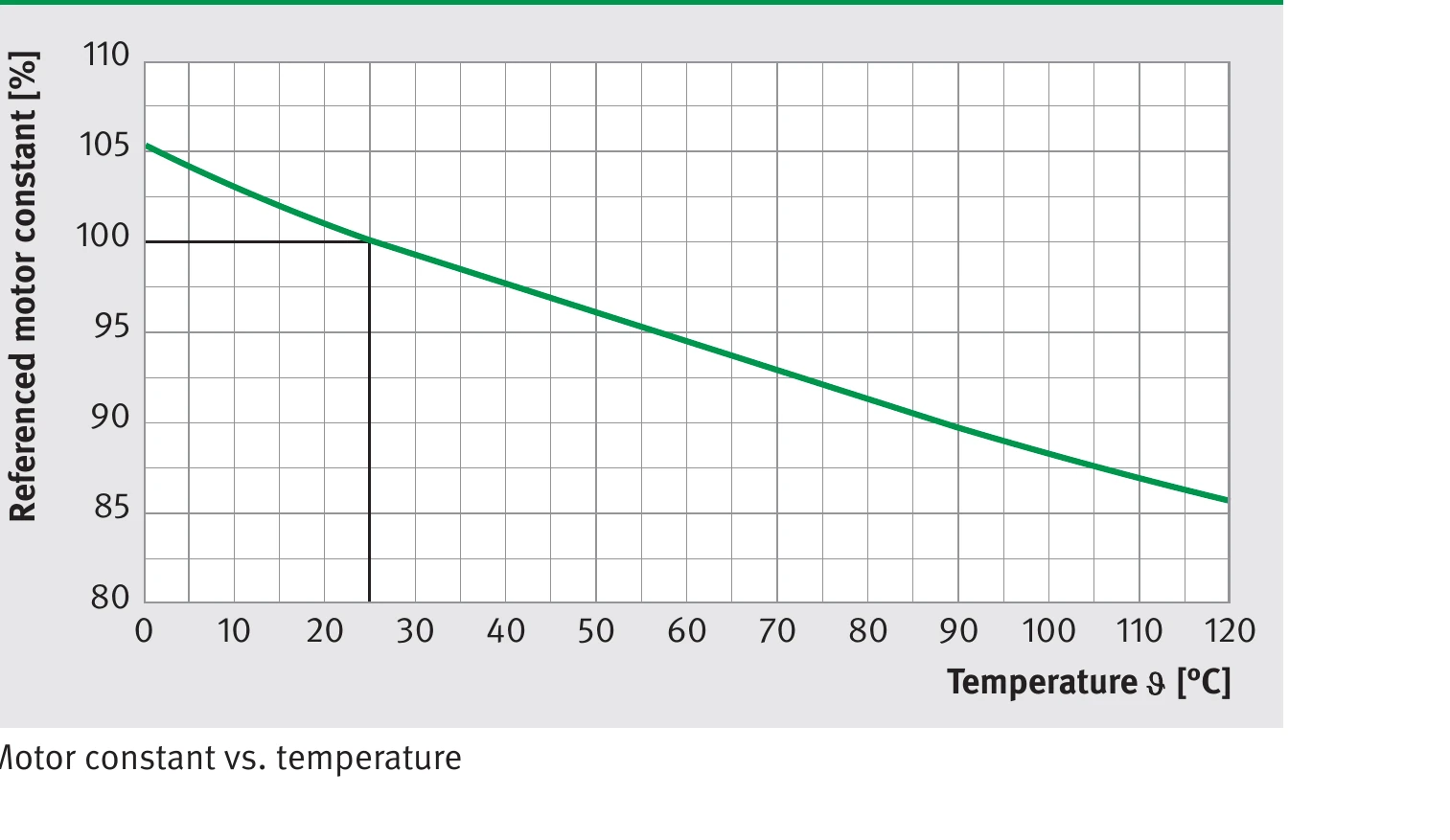
电机常数 km 随温度变化的依赖关系(以 25 °C 为 100% 参考值)
高速注意事项
随著速度增加,功率损耗 Pl 还会受到与频率相关的磁反转损耗和涡流损耗的补充,这些损耗不包含在电机常数 km 中,但在极限速度范围内变得显著,需纳入考量。电机常数 km 仅适用于力-电流特性的线性区域。
绕组设计与依存性
任何线性马达的可达极限速度在很大程度上取决于绕组设计和直流母线电压(UDCL)。电机内部电压降随速度增加而上升。在指定的极限速度下,面向磁场控制的电压需求对应伺服转换器的母线电压。超过此点后,速度会急速下降。
母线电压越高,绕组相关的电压常数(ku)越小,可达到的极限速度就越高。由于电压常数和力常数之间的关联性,力常数在较高速度下会随著相同力的电流需求增加而增大。
绕组变体
对于绕组资料,每种电机尺寸都预先定义了标准绕组 WM(适用于中等动态需求)。如需较低或较高的动态需求,可另外提供绕组变体 WL 和 WH。
- WL:低动态需求(较低母线电压下的极限速度几乎按比例降低)
- WM:标准动态需求(预设绕组)
- WH:高动态需求
力-电流特性描述了不同工作点下的力。力-速度特性则呈现了不同工作点下力与速度之间的关系。
L1 线性马达系列
力-速度特性
永磁同步电机的 F(v) 特性在低速段几乎与速度无关。这适用于 Fp、Fcw 和 Fc 直到其对应的转折速度 vlp、vlcw 和 vlc。在较高速度下,由于反电动势(Back EMF*)的影响,力逐步降低,最终降至零。
透过更高的母线电压可以补偿更大的反电动势,从而达到更高的速度。
工作条件
电机可在 F(v) 特性曲线下方的任意工作点运行:
- 在无冷却连续运行中,力最高可达 Fc
- 在水冷连续运行中,力最高可达 Fcw
- 在周期性间歇运行(S3**)中,力最高可达 Fp
闭回路控制的电机运动需要在潜在工作点与 F(v) 特性的下降段之间保持适当的距离。通常应保留约 0.2 倍最大速度的距离作为控制余裕。
v = 0 m/s 时的力
在静止状态下使用连续力(Fs)时(例如 Z 轴无质量补偿),需注意最大只能使用 70% 的额定力。超过此降额值可能导致电机局部过载。
Fs = 0.7 × Fc(或 Fcw)
*Back EMF:反电动势(Back Electromagnetic Force)
**S3:依据 VDE 0530 标准的运行模式
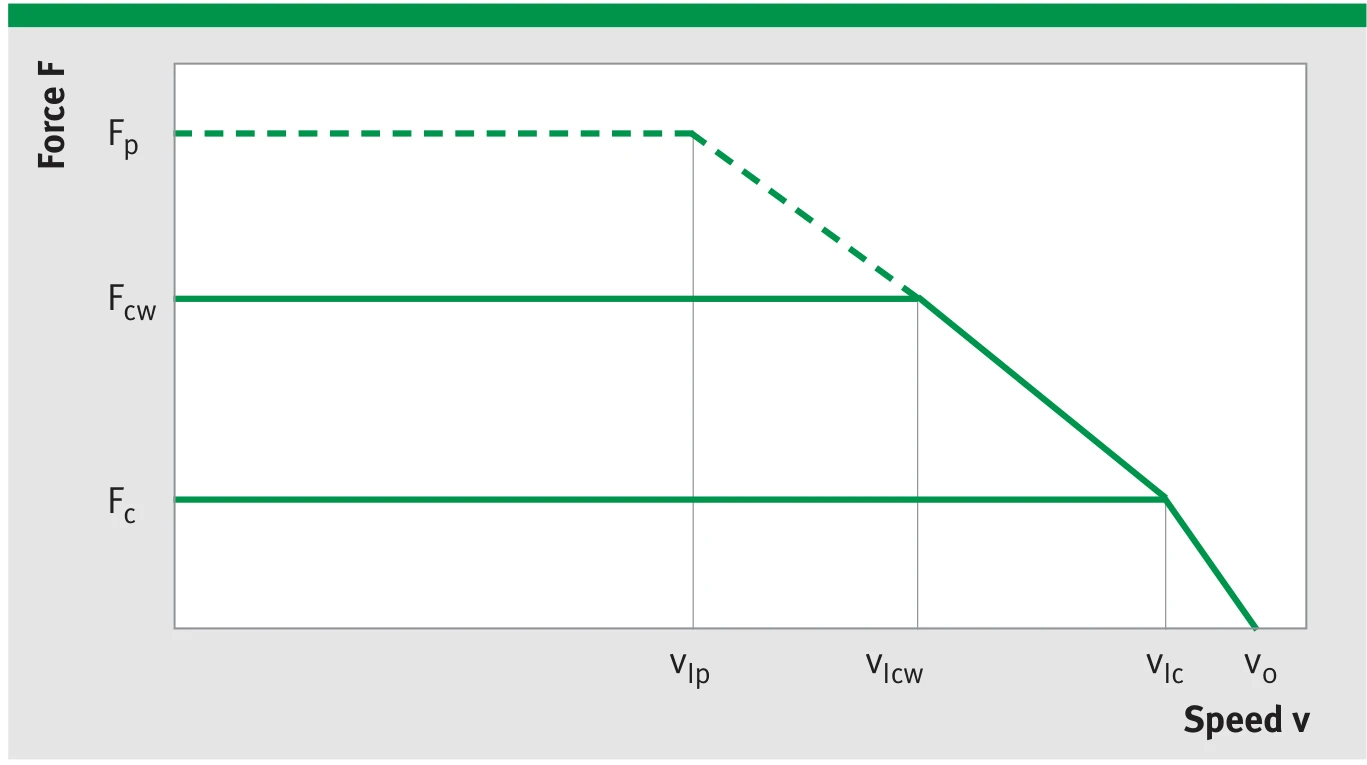
力-速度(F-v)特性曲线:Fp(峰值力)、Fcw(水冷连续力)、Fc(无冷却连续力)与对应转折速度
力-电流特性
从原点 (0,0) 到 (Fpl, Ipl) 的特性曲线近似线性段,由力常数 kf 定义:
F = I × kf
无冷却运行的工作点 (Fc, Ic) 和水冷运行的工作点 (Fcw, Icw) 皆落在此线性区域内。
饱和区域
在大电流下,力-电流特性的非线性来自电机磁路的饱和。此段曲线在资料表和图中以力-电流工作点 (Fp, Ip) 和 (Fu, Iu) 描述,其斜率比 kf 平坦得多。
电机可在短时间内(周期性地持续 ≤3 秒)运行到工作点 (Fp, Ip),前提是平均热损耗已被纳入考量。对于加速过程,这是应使用的最大工作点。
极限点 (Fu, Iu)
极限点绝不可被超越,否则存在电机过载的风险。此点仅用于短路制动的考量,不可作为选型依据。
所有参数均在词汇表中说明。
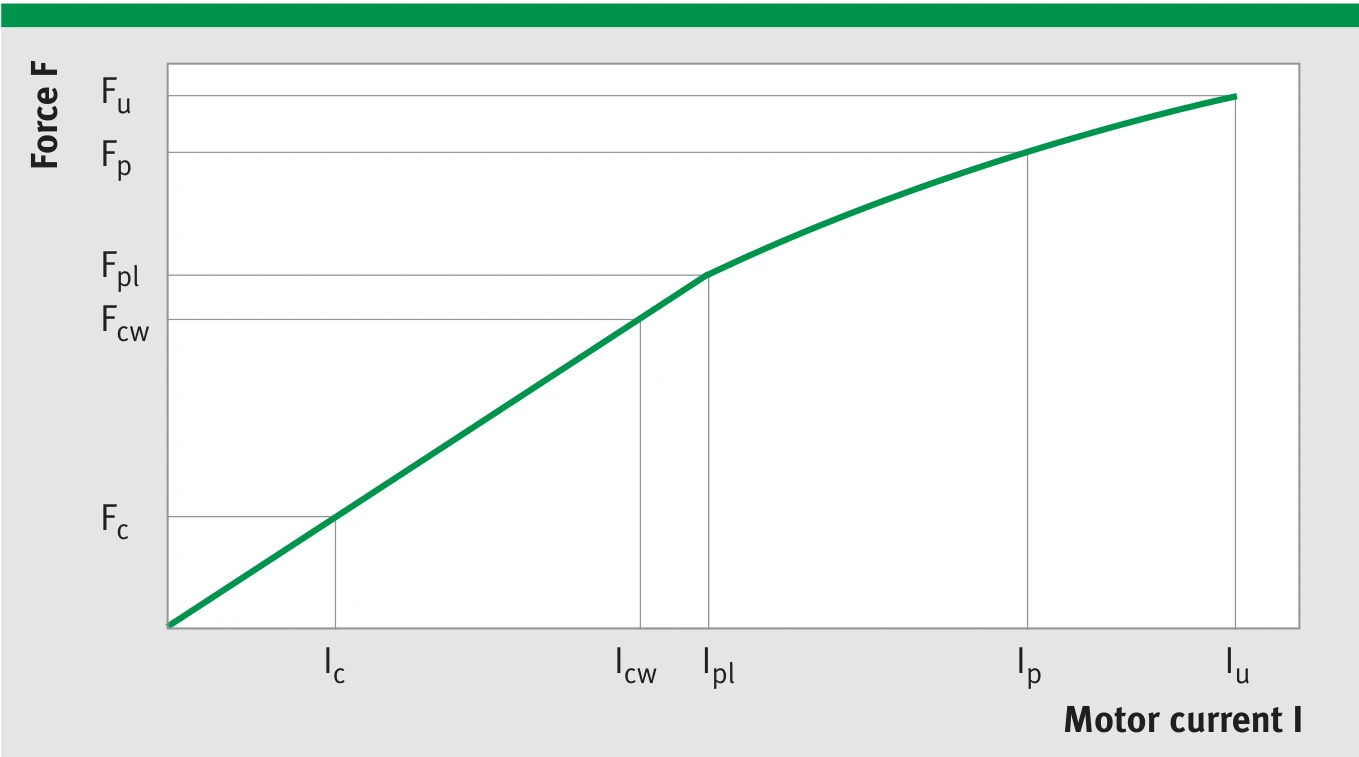
力-电流(F-I)特性曲线:线性区域(由 kf 定义)与饱和区域(Fp/Fu 工作点)
热保护
直线驱动器经常在其热性能极限附近运行。此外,运行中可能发生不可预见的过载,导致电流超过允许的额定电流。因此,电机的伺服控制器通常应配备过载保护,以控制电机电流。这里需要确保电机电流的有效值(均方根值)仅允许在短时间内超过容许的额定电流。这种间接温度监控既快速又可靠。
IDAM 电机配备有温度感测器(PTC 和 KTY),可用于热保护。
监控回路 I — PTC 感测器
三个相绕组各配备一个串联连接的 PTC(正温度系数热敏电阻),以确保电机保护。PTC 是一种正温度系数的热敏电阻,安装后其热时间常数低于 5 秒。
PTC 工作原理
当额定响应温度 Tn 被超过时,PTC 的电阻会急剧上升,增加到冷态值的数倍。三个 PTC 元件串联连接后,即使只有一个元件超过 Tn,整体电阻也会出现明显变化。
使用三个感测器可确保即使电机在静止状态下存在不对称的相负载,也能发出安全关断信号。
市售的电机保护跳脱装置连接在下游,通常在 1.5 kΩ 至 3.5 kΩ 之间触发。如此,过温可被侦测到每个绕组几度的精度范围内。
跳脱装置在 PTC 电路电阻过低时也会反应,这通常表示监控电路存在缺陷。同时确保了控制器与电机感测器之间的电气隔离。电机保护跳脱装置不包含在供货范围内。
原则:PTC 感测器讯号必须被监控,以保护电机免于过温损坏。
PTC 不适用于温度量测。如需温度量测功能,应使用 KTY 感测器。
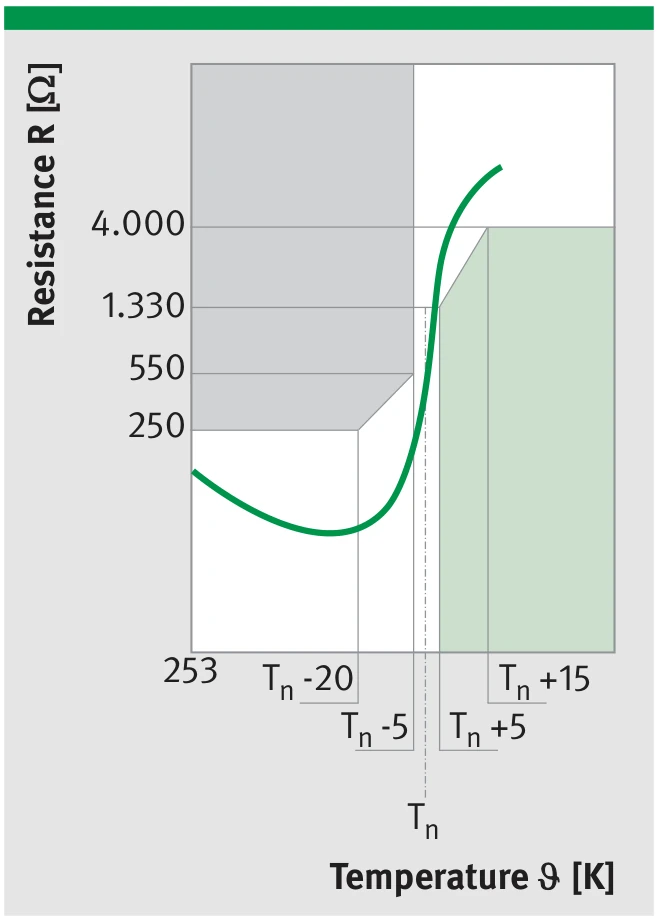
PTC 感测器电阻-温度特性:超过额定响应温度 Tn 后电阻急剧上升
监控回路 II — KTY84-130 感测器
电机的其中一相上额外配备一个 KTY84-130 感测器。这是一种具有正温度系数的半导体电阻,会产生与温度等效的讯号(带有延迟,延迟取决于电机类型)。
为了保护电机免于过温,控制器中会设定一个关断限值。当电机静止时,恒定电流流过绕组,电流大小取决于各自的极位置。因此,电机不会均匀发热,可能导致未受监控的绕组过热。
KTY 感测器用途
KTY 感测器监控单一绕组。其讯号可用于观察温度或发出警告。不允许单独使用 KTY 作为关断依据。
Imax = 2 mA
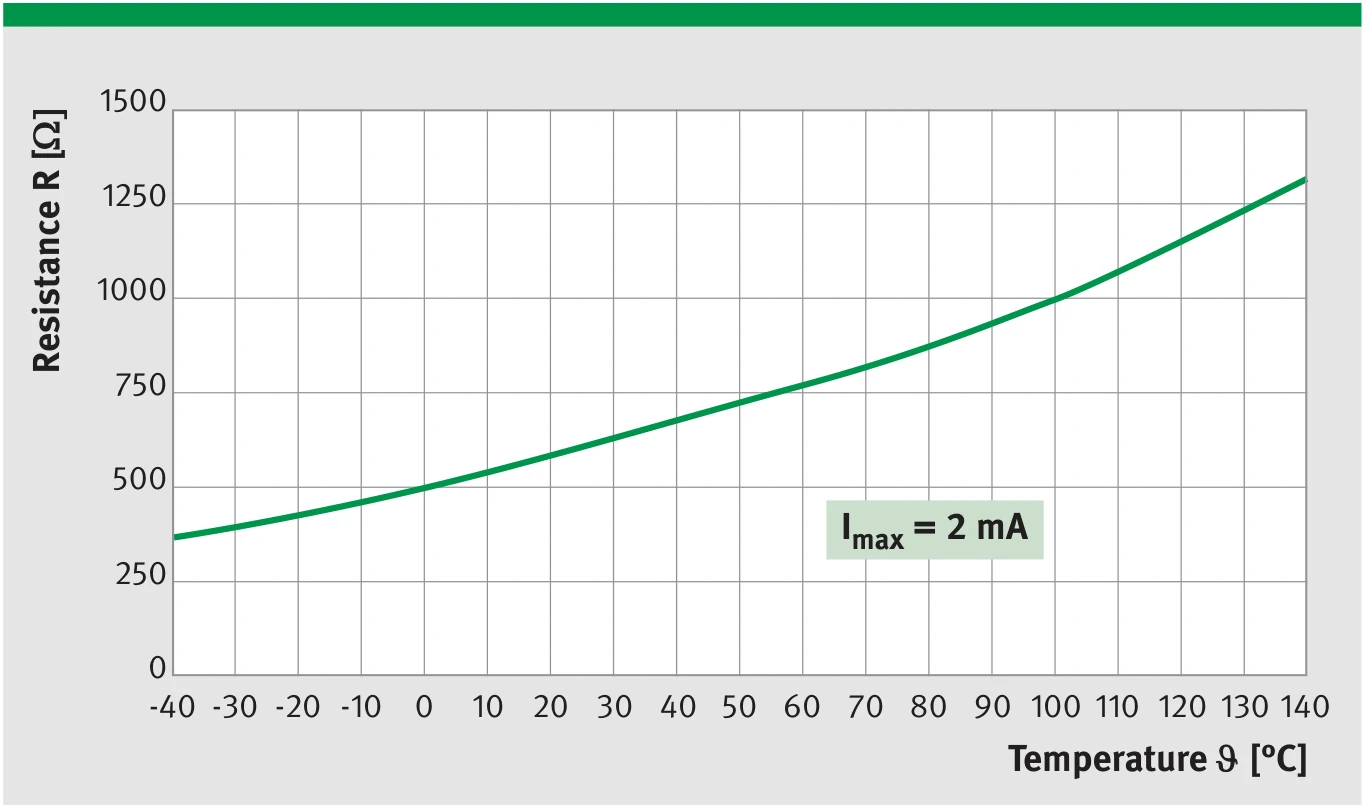
KTY84-130 感测器电阻-温度特性:线性正温度系数,可精确量测绕组温度
PTC 与 KTY 标准接线
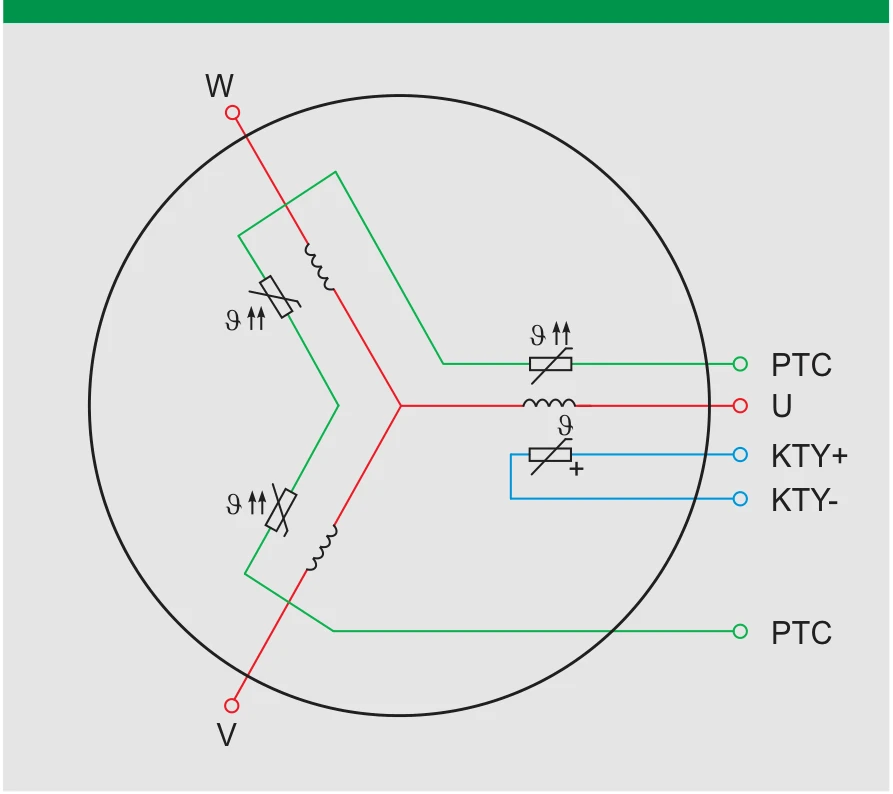
PTC 与 KTY 标准接线:PTC 感测器串联嵌入三相绕组,KTY 感测器连接单相绕组
PTC 和 KTY 感测器具有基本的绝缘保护,不适合直接连接到 PELV/SELV 电路(依据 DIN EN 50178 标准)。
可依客户要求整合更多的监控感测器。
电气连接
IDAM 电机的标准连接从端面引出。标准电缆长度从电缆引出电机处起为 1000 mm。可依要求提供不同长度。电源线的截面积取决于连续电机电流,并记录在型录图面中。标准情况下,L1A 和 L1B 的尺寸按自然冷却连续电流 Ic 在功率损耗 Pl 下设计,L1C 则按水冷连续电流 Icw 在功率损耗 Plcw 下设计。
电机电缆截面积从 4G0.75 mm² 起。感测器电缆 4 × 0.14 mm²(d = 5.1 mm)可透过 PTC 和 KTY 进行温度监控。线端为开放式,附有端子套。使用的电缆为 UL 认证,适用于拖链。
带端子的电机版本(WAGO 系列 236 型端子排,适用于最大 1.5 mm² 线径)可作为带端套的替代方案。电缆出口或端子的位置标示在资料表中。对于无水冷且连续电流不超过 16 A 的变体,端子的使用不受限制。
端子分配
电机端子
| 线芯 | 端子号 | 功能 |
|---|---|---|
| U | 1 | Phase U |
| VV | 2 | Phase V |
| WWW | 3 | Phase W |
| GNYE | 4 | PE(保护接地) |
| BK | — | 屏蔽 |
感测器端子
| 线芯 | 端子号 | 功能 |
|---|---|---|
| WH | 7 | PTC |
| BN | 8 | PTC |
| GN | 5 | + KTY |
| YE | 6 | - KTY |
正运动方向
所有三相电机中,电气正运动方向对应右旋磁场,即相电压依序以 U、V、W 的顺序感应。在 IDAM 电机上,正运动方向为:
- 朝向无电缆一侧的方向(电缆版本)
- 朝向无端子一侧的方向(端子版本)
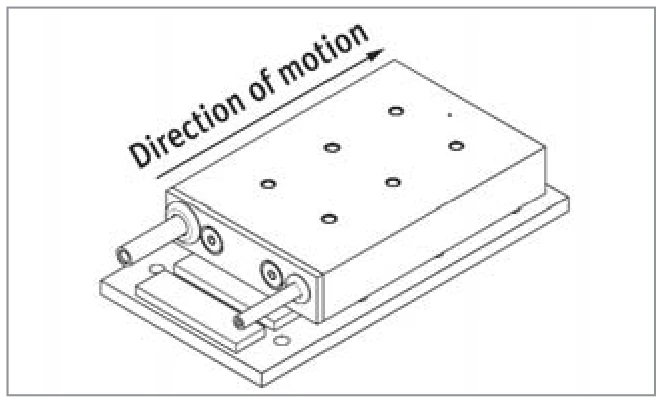
电缆版:正方向为朝向无电缆一侧
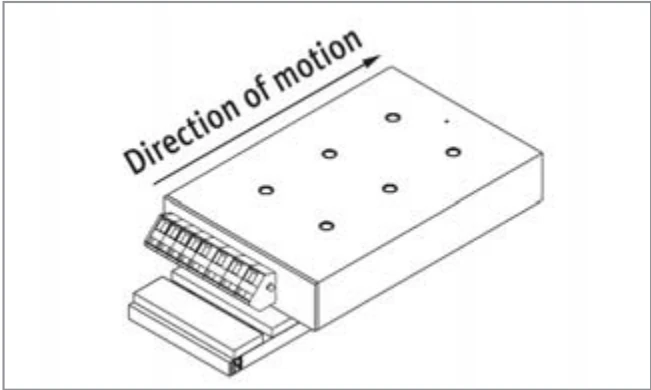
端子版:正方向为朝向无端子一侧
电机电缆选型
| 连续电流 I [A] | 电缆截面积 [mm²] | 直径 dk [mm] | 动态弯曲半径 rd [mm] | 静态弯曲半径 rs [mm] |
|---|---|---|---|---|
| ≤9 | 0.75 | 7.3 | 73 | 44 |
| ≤16 | 1.5 | 10 | 100 | 60 |
| ≤22 | 2.5 | 11.6 | 120 | 70 |
换向
同步电机较佳的运行方式是换向运行。IDAM 线性马达标准上不配备 Hall 感测器。IDAM 建议使用量测系统进行换向。
换向方式
同步电机透过量测系统(如光学尺)侦测转子位置,并依此控制相电流的切换时序。相较于 Hall 感测器的六步换向,量测系统换向可实现更平滑的正弦波电流控制,带来更低的力脉动和更高的定位精度。
绝缘电阻
母线电压不超过 600 VDC 的绝缘电阻
IDAM 电机符合 EC 指令 73/23/EEC 以及欧洲标准 EN 50178 和 EN 60204。出货前经过分级高压测试,并在真空中灌封。
请确保遵守电机的额定工作电压。
变频器运行时的电机端子过电压
由于极快速切换的功率半导体产生高 du/dt 负载,电机端子处可能出现明显高于实际变频器电压的电压尖峰,尤其是在使用较长的连接电缆(5 m 以上)时。这对电机绝缘造成很高的负载。
PWM 模组的 du/dt 值不得超过 8 kV/µs。电机连接电缆应尽量缩短。
为了保护电机,建议始终使用示波器以特定配置量测施加到电机绕组相对于 PE 的变频器电压(PWM)。现有的电压尖峰不应显著超过 1 kV。从约 2 kV 起,应预期绝缘会逐渐损坏。
IDAM 工程师将协助您确定应用方案并降低过高电压。
请遵守变频器制造商提供的建议和配置说明。
冷却与冷却回路
功率损耗与热损耗
除了电机常数 km 定义的功率损耗外,电机在较高控制频率(50 Hz 以上)下还会受到与频率相关的损耗影响。这些损耗共同导致电机和其他系统组件升温。
以下规则适用于低控制频率(<80 Hz):具有较高电机常数 km 的电机相对于具有较低 km 的可比电机,会产生更低的功率损耗。
运行期间产生的功率损耗透过电机总成传递到相连的元件。整个系统经过精心设计,以控制热量分配方式,透过对流、传导和辐射来控制。
对于 L1C 电机,可选配冷却系统作为附件来改善散热。液冷电机的连续力约为非冷却电机的两倍。
主动冷却
主动冷却应优先用于高性能和高动态运行的机器,以及对应的高轴承负载场合。
如果需要电机和机器之间完全的热隔离(例如高精度机械中防止热变形),则需要额外的隔热层与精密冷却。实际冷却即为主冷却或功率冷却系统。
冷却板
电机冷却系统以冷却板形式实现,安装在电机与机台之间,应由客户连接到冷却装置的冷却回路中。隔热层和冷却板可作为电机零件的选附件供应,或作为客户机器设计的一部分。
冷却介质透过内部铜管从进口流经出口。进出口连接可分配到两个水口,连接口为 G 1/8 内螺纹。
使用水作为冷却剂时,必须添加防腐蚀和防生物沉积的添加剂。
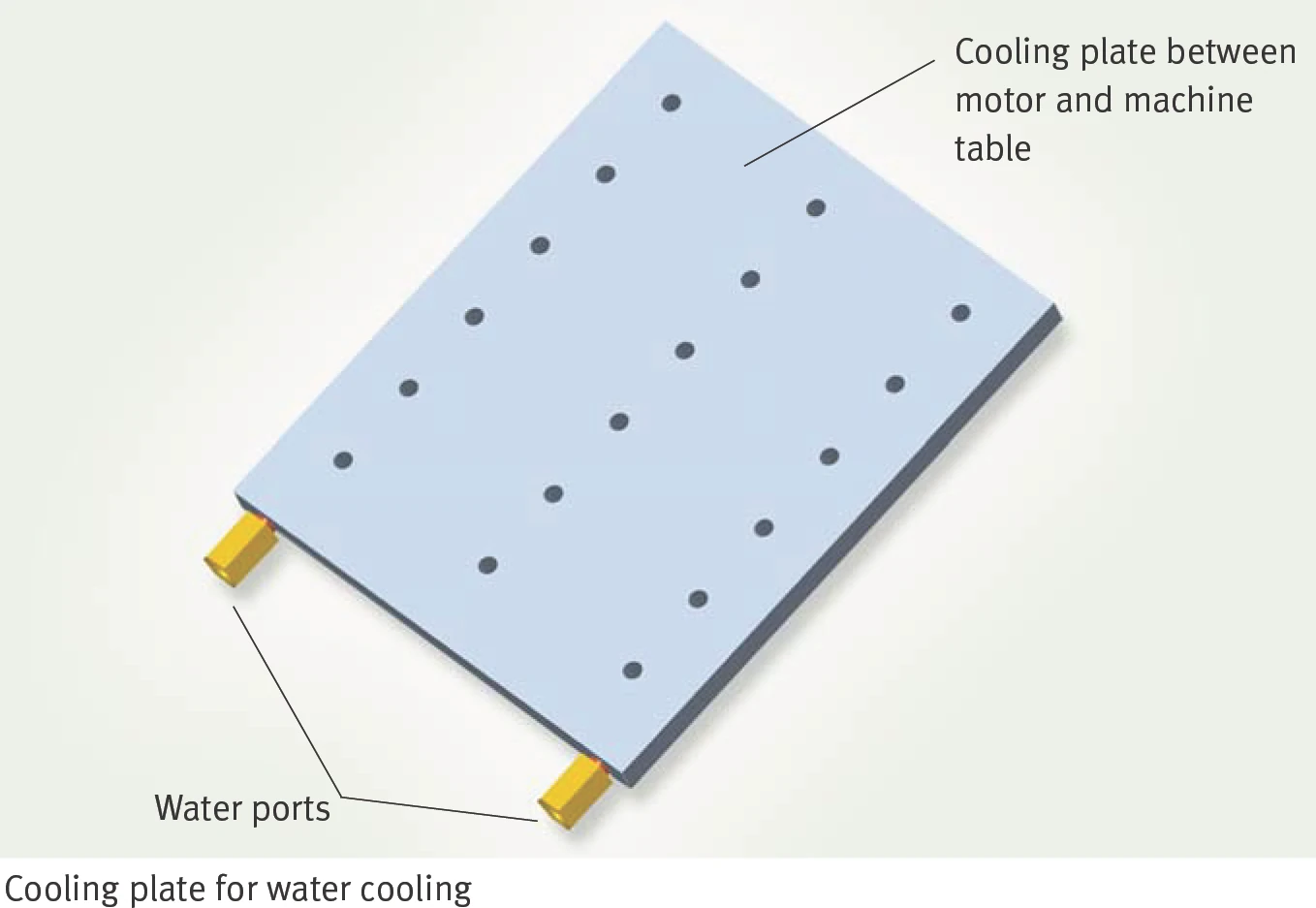
水冷用冷却板
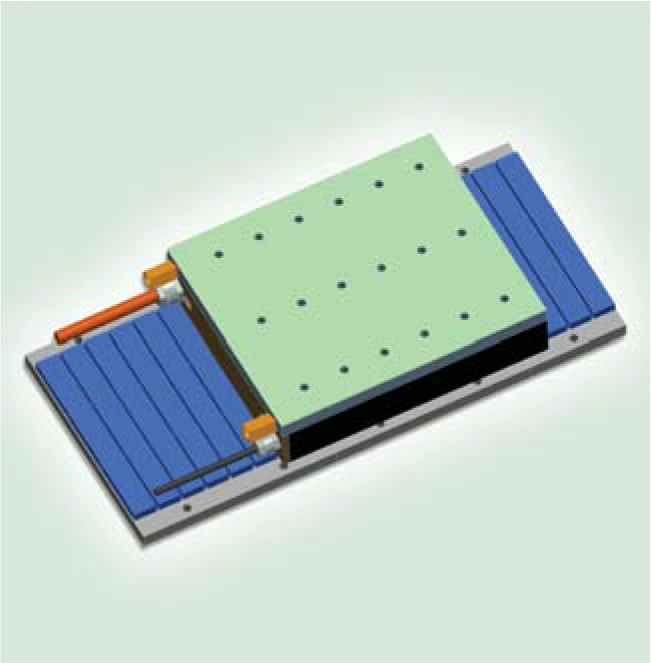
冷却板安装于电机与机台之间
冷却介质温度依存性
资料表中标示的水冷连续电流 Icw 是在额定供水温度 θnV = 25 °C 下可达到的值。较高的供水温度 θV 会降低冷却性能,从而降低额定电流。
降额后的连续电流 Ic red 可由以下二次方程式计算:
Ic red / Icw = √((θmax − θV) / (θmax − θnV))
- Ic red:降额连续电流 [A]
- Icw:额定水冷连续电流(在 θnV 下)[A]
- θV:实际供水温度 [°C]
- θnV:额定供水温度 [°C]
- θmax:最大允许绕组温度 [°C]
(适用于恒定电机电流条件下)
L1C 接线端子型电机
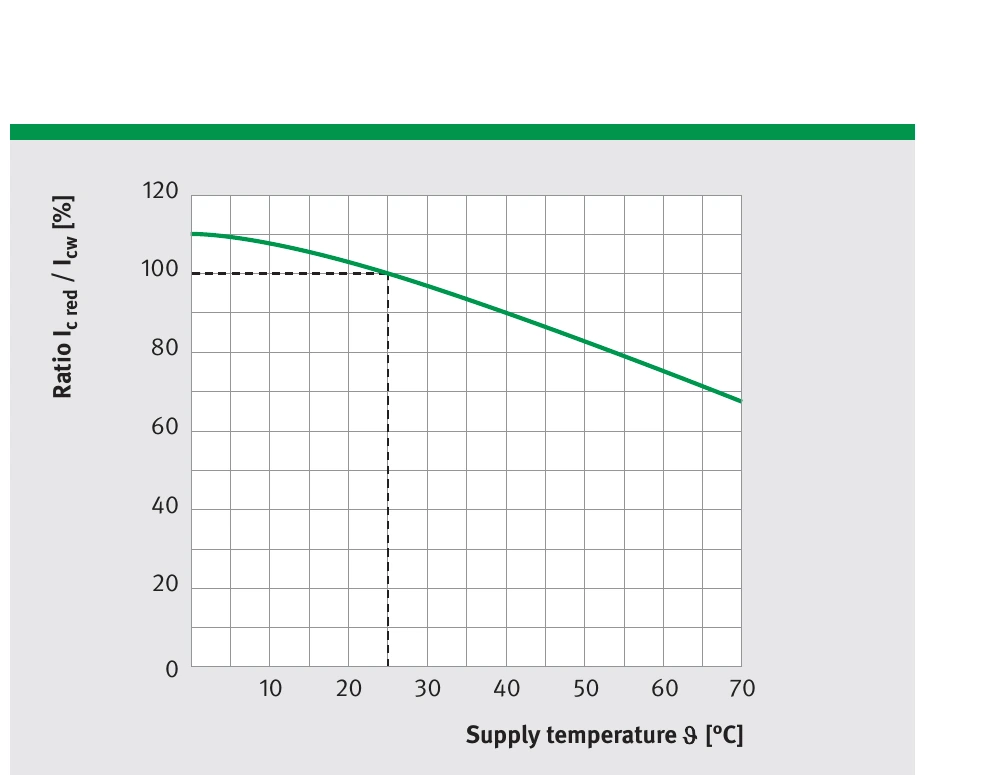
相对连续电流 Ic red / Icw 对供水温度 θV 特性曲线(θnV = 25 °C)
直线直驱马达选型
周期性应用
在周期性运行中,连续的定位移动与暂停交替进行。简单的定位序列采用正加速运动形式,随后是通常等量值的减速(负加速度),此时加速和减速时间相等。最大速度 vmax 在加速阶段结束时达到。
一个周期在 v(t) 图中描述(v:速度,t:时间)。图示为带暂停的前进-后退运动(tM:运动时间,tP:无负载停留时间)。
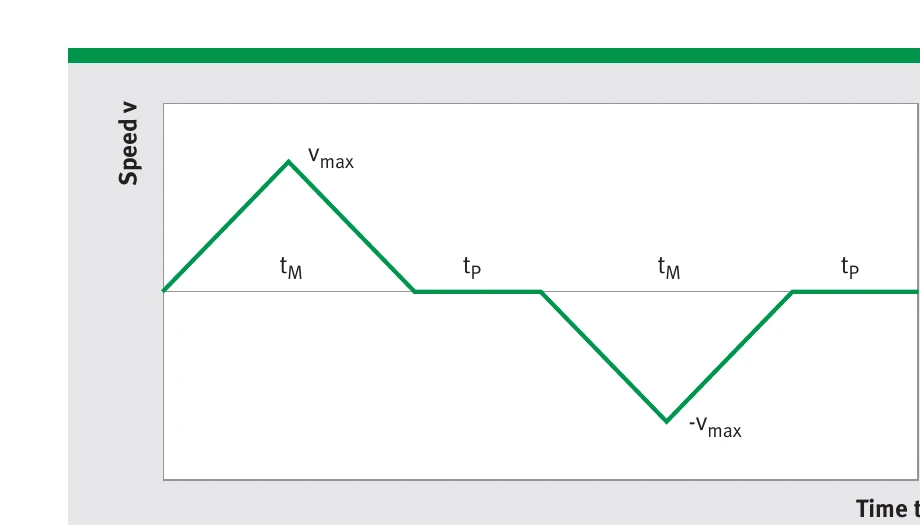
周期性运行的 v-t 图(速度-时间图)
由此可得出 a(t) 图(加速度-时间图)以及运动所需的力曲线:
F = m × a
- F:力 [N]
- m:质量 [kg]
- a:加速度 [m/s²]
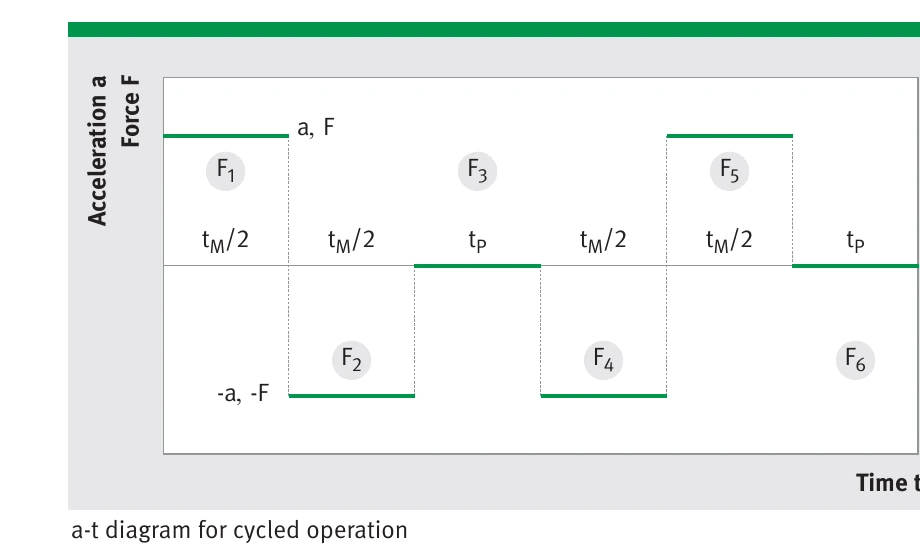
周期性运行的 a(t) 图(加速度/力-时间图)
选型三准则
电机依据以下三个准则选择,需符合所需周期的力曲线:
- 最大力:周期内最大力 ≤ Fp(依资料表)
- 有效力:周期内有效力 ≤ Fc(非冷却)或 Fcw(水冷),依资料表
- 最大速度:周期内最大速度 ≤ vlp(依资料表)
有效力计算
有效力等于周期内力曲线的均方根值(以下示例含六个力段):
Feff = √( (F1²·t1 + F2²·t2 + … + F6²·t6) / (t1 + t2 + … + t6) )
代入各段力与时间(F1 = F、F2 = −F、F3 = 0、F4 = −F、F5 = F、F6 = 0;t1 = tM/2、t2 = tM/2、t3 = tP、t4 = tM/2、t5 = tM/2、t6 = tP),可化简为:
Feff = F · √( tM / (tM + tP) )
此公式仅适用于所有作用力大小相同(质量与加速度均为常数)的情况。分母为周期时间(运动时间 + 暂停时间)。
范例计算(第 19 页)中安全系数 1.4 亦包含电机在力-电流特性非线性区域工作的考量,此时 Feff 公式仅为近似值。
定位运动的加速度与最大速度
a = 4 · x / tM²
vmax = 2 · x / tM
- x:总行程 [m]
- tM:运动时间 [s]
- a:加速度 [m/s²]
- vmax:最大速度 [m/s]
以上定位运动采用理论上无限大的加加速度(jerk)。若伺服驱动器中设定了加加速度限制,定位时间会相应延长;此情况下需要更大的加速度以维持相同的定位时间不变。
周期性应用计算范例
| 预设值 | 计算结果 | ||
|---|---|---|---|
| 总行程 | x = 0.7 m | 最大速度 | vmax = 2 × 0.7 / 0.3 = 4.67 m/s |
| 质量 | m = 10 kg | 加速度 | a = 4 × 0.7 / 0.3² = 31.1 m/s² |
| 运动时间 | tM = 0.3 s | 最大力 | Fmax = (10 kg × 31.1 m/s² + 5 N) × 1.4 = 442.4 N |
| 摩擦力 | Ff = 5 N | 有效力 | Feff = (10 kg × 31.1 m/s² × √(0.3/1.3) + 5 N) × 1.4 = 216.2 N |
| 周期时间 | tcyc = 1.3 s | ||
| 安全系数 | 1.4 | ||
非水冷电机选型
条件:Fmax ≤ Fp 且 Feff ≤ Fc
✓ L1A-3P-200-75-WM
直流链路电压 600 V 可达到所需速度。
水冷电机选型
条件:Fmax ≤ Fp 且 Feff ≤ Fcw
✓ L1C-3P-100-75-WM
冷却板增加约 500 g 质量(已计入)。直流链路电压 600 V 可达到所需速度。