Ưu điểm truyền động tuyến tính
Hiệu suất
- Không cần chuyển đổi chuyển động
- Hệ thống truyền động không có độ đàn hồi, độ rơ, ma sát hay trễ do các phần tử truyền động hoặc khớp nối gây ra.
- Động cơ nhỏ gọn
- Do lực tiến cao tương đối so với khối lượng được tăng tốc thấp, có thể đạt hiệu suất tăng tốc cực cao. Toàn bộ dải từ tốc độ không đến tốc độ tối đa đều có thể sử dụng.
- Đo vị trí trực tiếp
- Thông qua đo vị trí trực tiếp và cấu trúc cơ học cứng, quá trình định vị có tính động học cao và chính xác.
Chi phí vận hành
- Không có thêm bộ phận chuyển động
- Công việc lắp ráp, điều chỉnh và bảo trì cho các thành phần truyền động giảm đáng kể.
- Không mài mòn trong hệ thống truyền động
- Ngay cả dưới tải trọng xen kẽ cao, hệ thống truyền động vẫn cực kỳ bền. Do đó thời gian ngừng máy giảm đáng kể.
- Độ sẵn sàng cao
- Ngoài việc kéo dài tuổi thọ và giảm mài mòn, độ bền của động cơ tuyến tính còn cải thiện tính sẵn sàng của hệ thống.
- Quá tải cơ học trong hệ thống truyền động không gây hư hỏng như động cơ có hộp số.
Thiết kế
- Không gian lắp đặt nhỏ gọn
- Thiết kế nhỏ gọn giảm yêu cầu không gian của mô-đun truyền động.
- Ít linh kiện hơn
- Thiết kế đã được kiểm chứng tạo điều kiện tích hợp các thành phần động cơ vào khái niệm máy tổng thể.
- Ít và bền hơn dẫn đến tỷ lệ lỗi thấp (MTBF* cao).
- Nhiều biến thể thiết kế
- Tạo điều kiện tích hợp tối ưu các thành phần động cơ vào khái niệm thiết kế máy tổng thể.
*MTBF: Mean Time Between Failures
Đặc điểm động cơ tuyến tính
Truyền động tuyến tính cho phép chuyển động tuyến tính mà không cần bộ chuyển đổi chuyển động hay bánh răng trung gian.
Động cơ tuyến tính bao gồm phần động và phần tĩnh. Phần động chứa các cuộn dây quấn, phần tĩnh bao gồm một bộ nam châm vĩnh cửu được sắp xếp đối diện với phần động. Các loại động cơ có thể được phân loại thành có rãnh, không rãnh và không lõi sắt, cũng như động cơ bước (động cơ từ trở lai đồng bộ).
Động cơ tạo ra lực đồng đều và điển hình trong một dải tốc độ nhất định. Độ lớn của lực được xác định bởi diện tích khe hở không khí hiệu quả giữa phần động và phần tĩnh.
Khi dòng điện được đưa vào phần động, trường điện từ xung quanh các cuộn dây quấn tạo ra lực tác động lên phần tĩnh, tạo ra chuyển động tuyến tính.
Hệ thống trục tuyến tính yêu cầu hệ thống dẫn hướng phù hợp để duy trì khe hở không khí giữa phần động và phần tĩnh, cũng như hệ thống đo tuyến tính để phát hiện vị trí động cơ.
Mỗi dòng động cơ bao gồm các lựa chọn chiều dài và chiều rộng khác nhau để đáp ứng các yêu cầu lực và lắp đặt khác nhau, đồng thời cung cấp nhiều biến thể lắp đặt và kết nối.
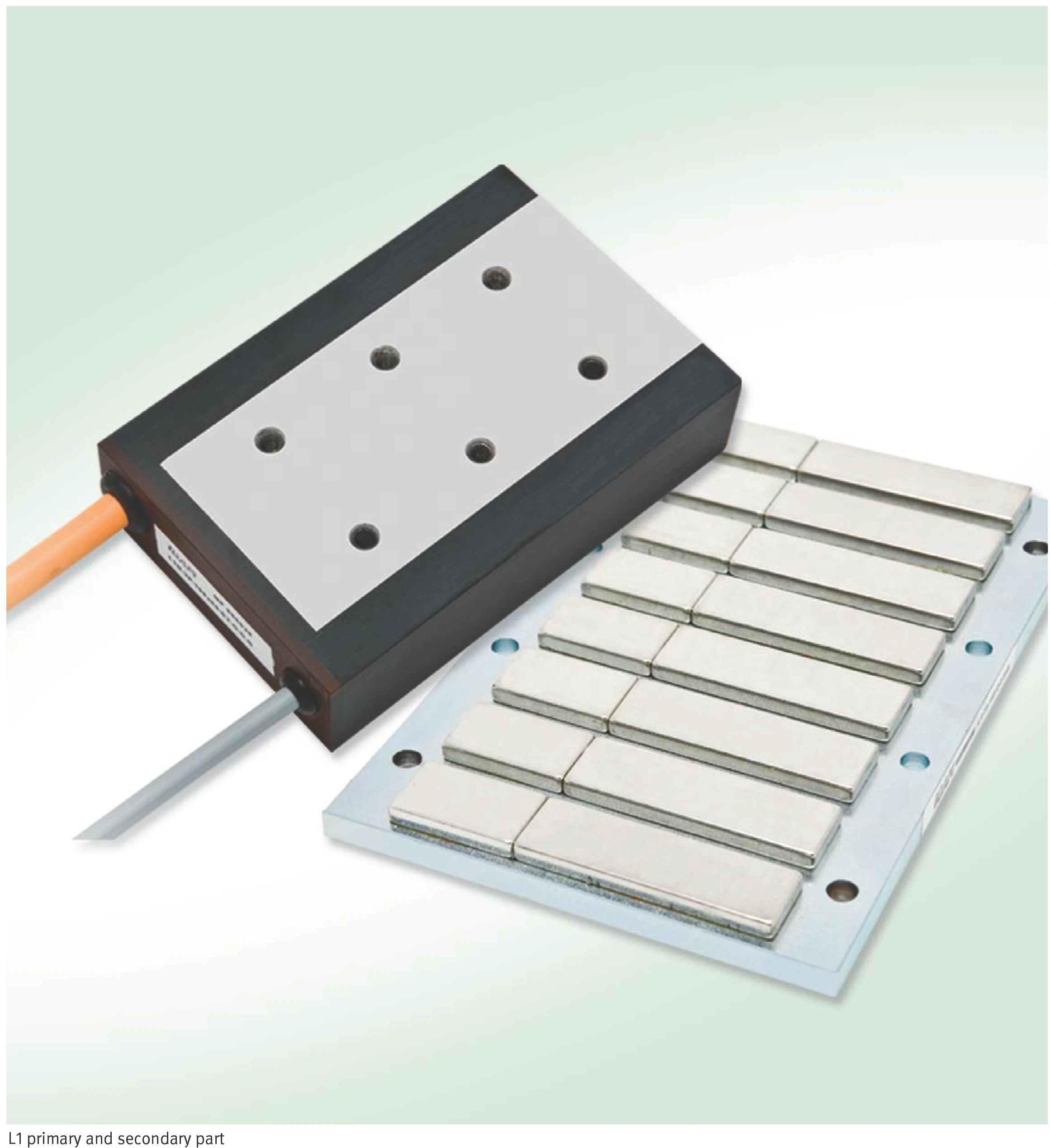
Động cơ tuyến tính L1: Primary Part và Secondary Part
Tổng quan dòng động cơ tuyến tính
Động cơ có rãnh
| Loại động cơ | Đặc điểm |
|---|---|
| Dòng L1A | Lực đỉnh tới 1010 N | Tỷ lệ lực/trọng lượng xuất sắc | Phù hợp cho ứng dụng tự động hóa với không gian lắp đặt thẳng đứng hạn chế |
| Dòng L1B | Lực đỉnh tới 1521 N | Tản nhiệt được tối ưu | Phù hợp cho ứng dụng tự động hóa yêu cầu lực tiến cao hơn |
| Dòng L1C | Lực đỉnh tới 5171 N | Tản nhiệt được tối ưu | Làm mát bằng nước | Phù hợp cho ứng dụng máy công cụ |
| Dòng L2U | Lực đỉnh tới 12000 N | Cấu trúc lược đôi | Tỷ lệ lực/thể tích xuất sắc | Tuổi thọ dài / Hiệu suất động học cao | Tùy chọn làm mát | Tốc độ không đổi | Trung hòa lực hút từ tính | Phù hợp cho ứng dụng máy công cụ |
Động cơ ít sắt / Không rãnh
| Loại động cơ | Đặc điểm |
|---|---|
| Dòng FSM | Thiết kế phẳng | Lực gợn tối thiểu | Hiệu suất động học cao và độ chính xác cao | Phù hợp cho ứng dụng máy đo |
Động cơ không lõi sắt
| Loại động cơ | Đặc điểm |
|---|---|
| Dòng ULIM | Hiệu suất động học xuất sắc | Tốc độ không đổi | Thiết kế nhỏ gọn | Phù hợp cho ứng dụng máy in và điện tử sản phẩm |
Động cơ từ trở
| Loại động cơ | Đặc điểm |
|---|---|
| LRAM | Động cơ bước | Không mài mòn | Ổ đỡ khí chính xác | Phù hợp cho ứng dụng pick-and-place trong điện tử sản phẩm | Phù hợp cho ứng dụng khối lượng nhỏ |
Thông số động cơ — Tiêu chí hiệu quả
Dựa trên kích thước động cơ, tổn hao công suất (tổn hao đồng) được tạo ra bởi lực và quá trình tại các điểm vận hành khác nhau là cố định và độc lập với thiết kế dây quấn. Vì động cơ tuyến tính không tạo ra công suất cơ học khi đứng yên, nên việc trích dẫn hệ số hiệu suất ở đây không có ý nghĩa.
Công thức tổn hao công suất
Khi dòng điện được chuyển đổi thành lực giữ hoặc lực tiến, tổn hao công suất hoặc nhiệt tỷ lệ với bình phương dòng điện độc lập với tải được tạo ra. Mối quan hệ này có giá trị trong dải động học tuyến tính và trong vận hành tĩnh ở nhiệt độ phòng.
Pl = (F / km)2
- Pl: Tổn hao công suất [W]
- F: Lực [N]
- km: Hằng số động cơ [N/√W]
Hằng số động cơ km có thể được sử dụng như một phương tiện để so sánh hiệu quả của các động cơ khác nhau. Hằng số động cơ cao hơn đại diện cho việc chuyển đổi lực so với tổn hao công suất hiệu quả hơn.
km theo nhiệt độ
Hằng số động cơ km phụ thuộc vào điện trở thuần và do đó cũng phụ thuộc vào nhiệt độ dây quấn của động cơ. Trong dữ liệu kỹ thuật động cơ, km được tham chiếu ở 25 °C.
Hình dưới đây cho thấy sự phụ thuộc của hằng số động cơ tham chiếu vào nhiệt độ: ở nhiệt độ dây quấn 100 °C, km giảm xuống khoảng 88% giá trị của nó ở 25 °C.
Ghi chú tốc độ cao
Khi tốc độ tăng, tổn hao công suất Pl được bổ sung thêm bởi tổn hao đảo từ phụ thuộc tần số và tổn hao dòng xoáy, không được bao gồm trong hằng số động cơ km, nhưng trở nên đáng kể trong dải tốc độ giới hạn và phải được tính đến. Hằng số động cơ km chỉ có giá trị cho vùng tuyến tính của đặc tính lực-dòng điện.
Thiết kế dây quấn và các phụ thuộc
Tốc độ giới hạn có thể đạt được của bất kỳ động cơ tuyến tính nào phụ thuộc phần lớn vào thiết kế dây quấn và điện áp bus DC (UDCL). Sụt áp nội của động cơ tăng theo tốc độ. Ở tốc độ giới hạn được chỉ định, nhu cầu điện áp cho điều khiển định hướng trường tương ứng với điện áp bus của bộ biến đổi servo. Vượt qua điểm này, tốc độ giảm mạnh.
Điện áp bus càng cao, hằng số điện áp liên quan đến dây quấn (ku) càng thấp và tốc độ giới hạn có thể đạt được càng cao. Do mối quan hệ giữa hằng số điện áp và hằng số lực, hằng số lực tăng ở tốc độ cao hơn khi nhu cầu dòng điện cho cùng lực tăng.
Biến thể dây quấn
Đối với dữ liệu dây quấn, một dây quấn tiêu chuẩn WM (phù hợp cho yêu cầu động học trung bình) được định sẵn cho mỗi kích thước động cơ. Đối với yêu cầu động học thấp hơn hoặc cao hơn, các biến thể dây quấn WL và WH cũng có sẵn.
- WL: Yêu cầu động học thấp (tốc độ giới hạn ở điện áp bus thấp hơn giảm xấp xỉ tỷ lệ)
- WM: Yêu cầu động học tiêu chuẩn (dây quấn mặc định)
- WH: Yêu cầu động học cao
Đặc tính lực-dòng điện mô tả lực tại các điểm vận hành khác nhau. Đặc tính lực-tốc độ cho thấy mối quan hệ giữa lực và tốc độ tại các điểm vận hành khác nhau.
Dòng động cơ tuyến tính L1
Đặc tính lực-tốc độ
Đặc tính F(v) của động cơ đồng bộ nam châm vĩnh cửu hầu như độc lập với tốc độ trong dải tốc độ thấp. Điều này áp dụng cho Fp, Fcw và Fc tới tốc độ góc tương ứng vlp, vlcw và vlc. Ở tốc độ cao hơn, lực giảm dần do ảnh hưởng của sức phản điện động*, cuối cùng giảm xuống không.
Điện áp bus cao hơn bù đắp cho sức phản điện động lớn hơn, cho phép đạt tốc độ cao hơn.
Điều kiện vận hành
Động cơ có thể hoạt động tại bất kỳ điểm vận hành nào dưới đường đặc tính F(v):
- Trong vận hành liên tục không làm mát, lực có thể đạt tới Fc
- Trong vận hành liên tục làm mát bằng nước, lực có thể đạt tới Fcw
- Trong vận hành gián đoạn theo chu kỳ (S3**), lực có thể đạt tới Fp
Đối với chuyển động động cơ điều khiển vòng kín, phải duy trì lề thích hợp giữa điểm vận hành tiềm năng và vùng giảm của đặc tính F(v). Lề khoảng 0.2 lần tốc độ tối đa thường được dự trữ làm dự phòng điều khiển.
Lực tại v = 0 m/s
Khi sử dụng lực liên tục (Fs) khi đứng yên (ví dụ: trục Z không có bù khối lượng), lưu ý rằng chỉ có thể sử dụng tối đa 70% lực định mức. Vượt quá giá trị giảm mức này có thể gây quá tải động cơ cục bộ.
Fs = 0.7 × Fc (hoặc Fcw)
*Sức phản điện động: Back Electromagnetic Force
**S3: Chế độ vận hành theo tiêu chuẩn VDE 0530
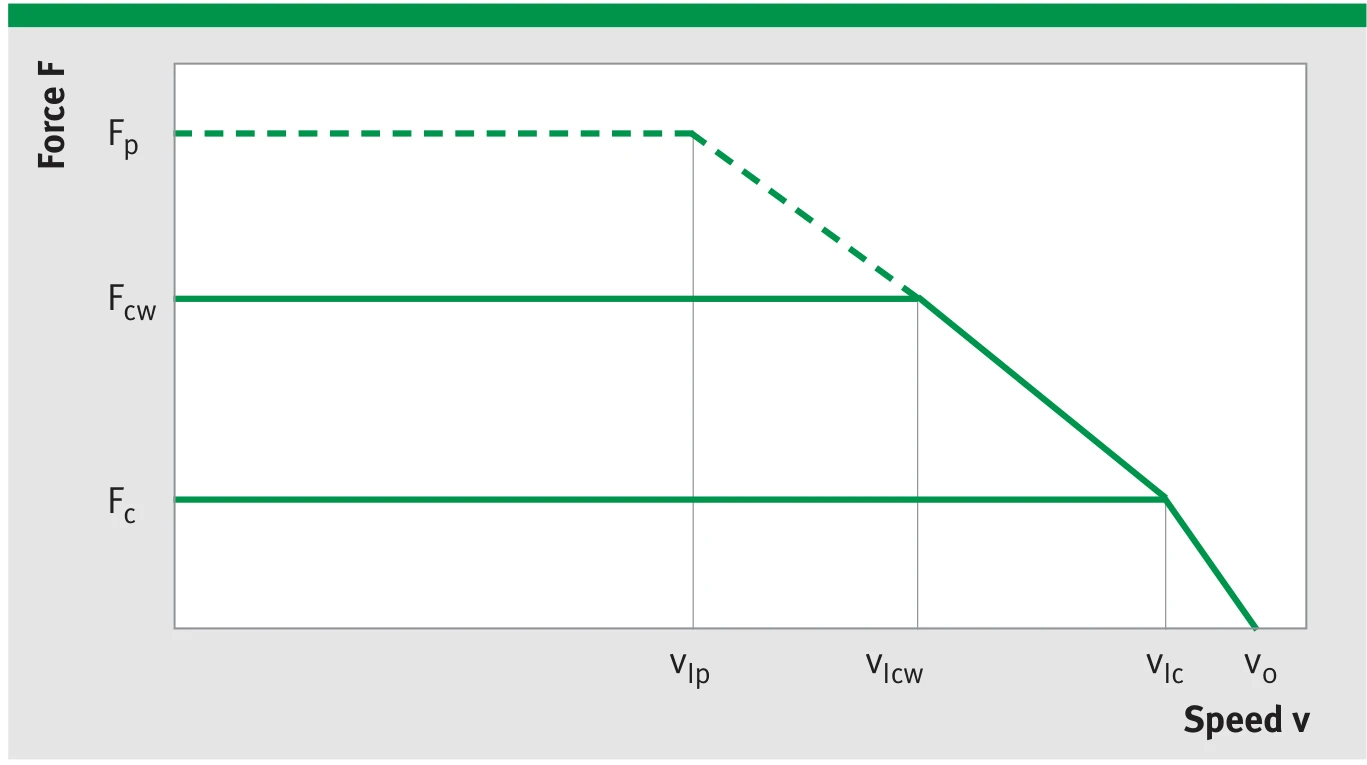
Đặc tính Lực-Tốc độ (F-v): Fp (lực đỉnh), Fcw (lực liên tục làm mát bằng nước), Fc (lực liên tục không làm mát) và tốc độ góc tương ứng
Đặc tính lực-dòng điện
Đường đặc tính từ gốc tọa độ (0,0) đến (Fpl, Ipl) xấp xỉ tuyến tính, được xác định bởi hằng số lực kf:
F = I × kf
Điểm vận hành cho vận hành không làm mát (Fc, Ic) và điểm vận hành cho vận hành làm mát bằng nước (Fcw, Icw) đều nằm trong vùng tuyến tính này.
Vùng bão hòa
Ở dòng điện cao, tính phi tuyến của đặc tính lực-dòng điện xuất phát từ sự bão hòa của mạch từ của động cơ. Đoạn đường cong này được mô tả trong bảng dữ liệu và sơ đồ bởi các điểm vận hành lực-dòng điện (Fp, Ip) và (Fu, Iu), với độ dốc thấp hơn nhiều so với kf.
Động cơ có thể hoạt động tại điểm vận hành (Fp, Ip) trong thời gian ngắn (theo chu kỳ ≤3 giây), miễn là tổn hao nhiệt trung bình đã được tính đến. Đây là điểm vận hành tối đa cần sử dụng cho quá trình tăng tốc.
Điểm giới hạn (Fu, Iu)
Điểm giới hạn không bao giờ được vượt quá; nếu không có nguy cơ quá tải động cơ. Điểm này chỉ được sử dụng cho các cân nhắc về phanh ngắn mạch và không được dùng làm cơ sở lựa chọn.
Tất cả các thông số được giải thích trong bảng thuật ngữ.
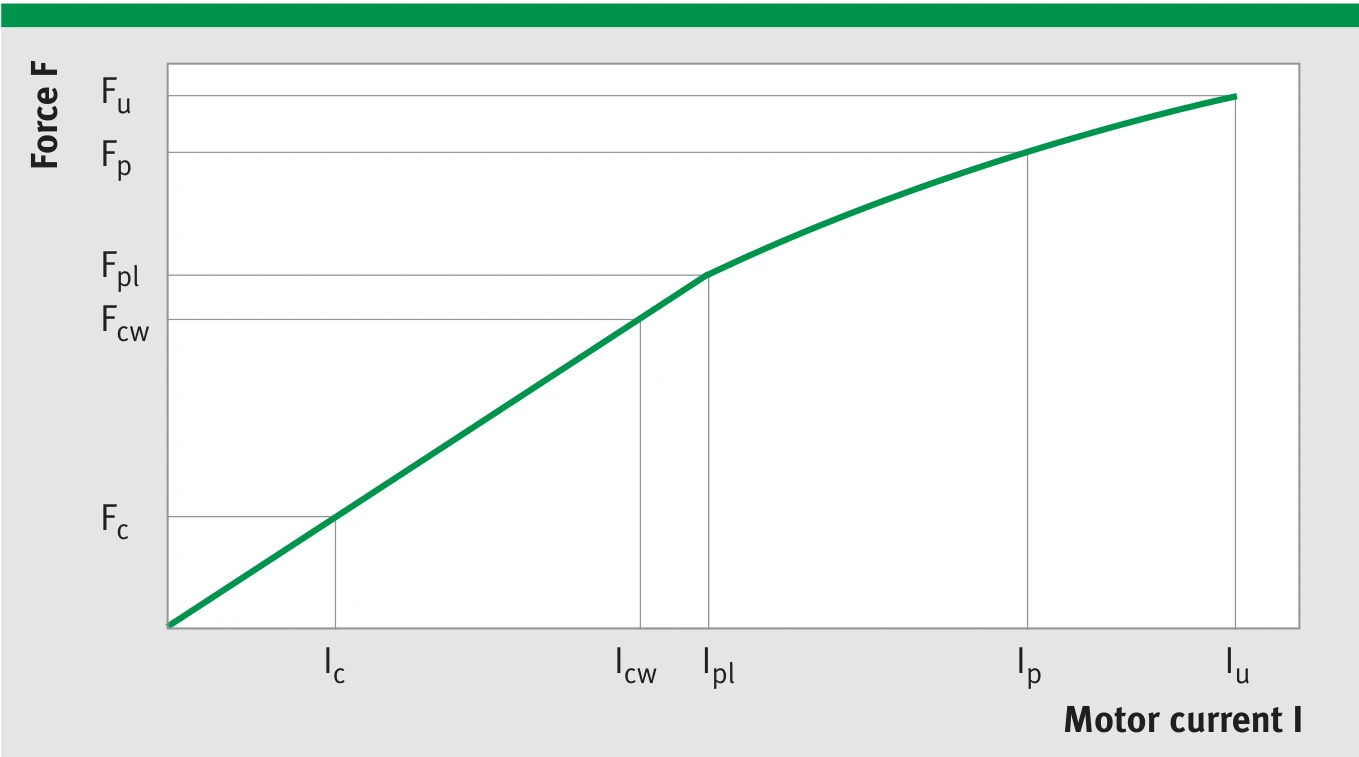
Đặc tính Lực-Dòng điện (F-I): vùng tuyến tính (xác định bởi kf) và vùng bão hòa (điểm vận hành Fp/Fu)
Bảo vệ nhiệt
Truyền động tuyến tính thường được vận hành gần giới hạn hiệu suất nhiệt của chúng. Ngoài ra, các quá tải không lường trước có thể xảy ra trong quá trình vận hành, làm cho dòng điện vượt quá dòng điện định mức cho phép. Do đó, bộ điều khiển servo cho động cơ thường phải được trang bị bảo vệ quá tải để kiểm soát dòng điện động cơ. Phải đảm bảo rằng giá trị RMS của dòng điện động cơ chỉ được phép vượt quá dòng điện định mức cho phép trong thời gian ngắn. Việc giám sát nhiệt độ gián tiếp này vừa nhanh vừa đáng tin cậy.
Động cơ IDAM được trang bị cảm biến nhiệt độ (PTC và KTY) có thể được sử dụng để bảo vệ nhiệt.
Mạch giám sát I — Cảm biến PTC
Mỗi trong ba pha dây quấn được trang bị PTC (nhiệt điện trở hệ số nhiệt dương) nối tiếp để đảm bảo bảo vệ động cơ. PTC là nhiệt điện trở hệ số nhiệt dương, và sau khi lắp đặt hằng số thời gian nhiệt của nó nhỏ hơn 5 giây.
Nguyên lý hoạt động PTC
Khi nhiệt độ phản ứng danh nghĩa Tn bị vượt quá, điện trở của PTC tăng mạnh, tăng lên gấp nhiều lần giá trị trạng thái nguội. Khi ba phần tử PTC được nối tiếp, ngay cả khi chỉ một phần tử vượt quá Tn, điện trở tổng thể cũng cho thấy sự thay đổi đáng kể.
Sử dụng ba cảm biến đảm bảo rằng tín hiệu tắt an toàn được phát ra ngay cả khi có tải pha không đối xứng với động cơ ở trạng thái dừng.
Thiết bị ngắt bảo vệ động cơ thương mại được kết nối ở hạ lưu, thường kích hoạt giữa 1.5 kΩ và 3.5 kΩ. Theo cách này, nhiệt độ quá cao có thể được phát hiện trong vòng vài độ của mỗi dây quấn.
Thiết bị ngắt cũng phản ứng khi điện trở mạch PTC quá thấp, thường cho thấy sự cố trong mạch giám sát. Điều này cũng đảm bảo cách điện điện giữa bộ điều khiển và cảm biến động cơ. Thiết bị ngắt bảo vệ động cơ không được bao gồm trong phạm vi cung cấp.
Nguyên tắc: Tín hiệu cảm biến PTC phải được giám sát để bảo vệ động cơ khỏi hư hỏng do nhiệt độ quá cao.
PTC không phù hợp để đo nhiệt độ. Nếu cần đo nhiệt độ, nên sử dụng cảm biến KTY.
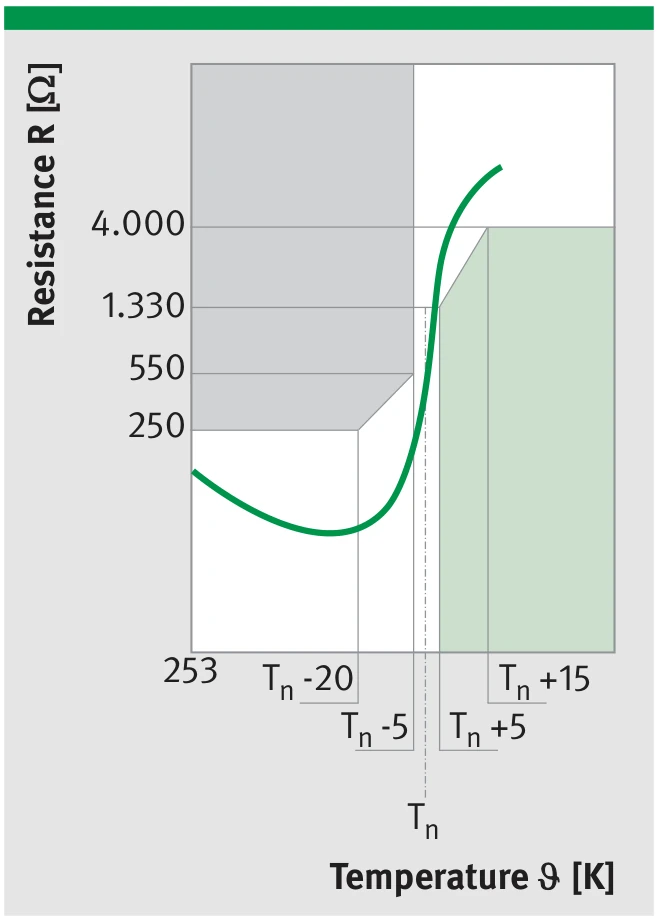
Đặc tính điện trở-nhiệt độ cảm biến PTC: điện trở tăng mạnh trên nhiệt độ phản ứng danh nghĩa Tn
Mạch giám sát II — Cảm biến KTY84-130
Một trong các pha động cơ được trang bị thêm cảm biến KTY84-130. Đây là điện trở bán dẫn với hệ số nhiệt dương tạo ra tín hiệu tương đương nhiệt độ (với độ trễ phụ thuộc vào loại động cơ).
Để bảo vệ động cơ khỏi nhiệt độ quá cao, một ngưỡng tắt được đặt trong bộ điều khiển. Khi động cơ ở trạng thái dừng, dòng điện không đổi chạy qua các dây quấn, độ lớn phụ thuộc vào vị trí cực tương ứng. Do đó, động cơ không nóng đồng đều, có thể dẫn đến quá nhiệt ở các dây quấn không được giám sát.
Mục đích cảm biến KTY
Cảm biến KTY giám sát một dây quấn đơn. Tín hiệu của nó có thể được sử dụng để quan sát nhiệt độ hoặc phát cảnh báo. Không được phép sử dụng KTY một mình làm cơ sở tắt.
Imax = 2 mA
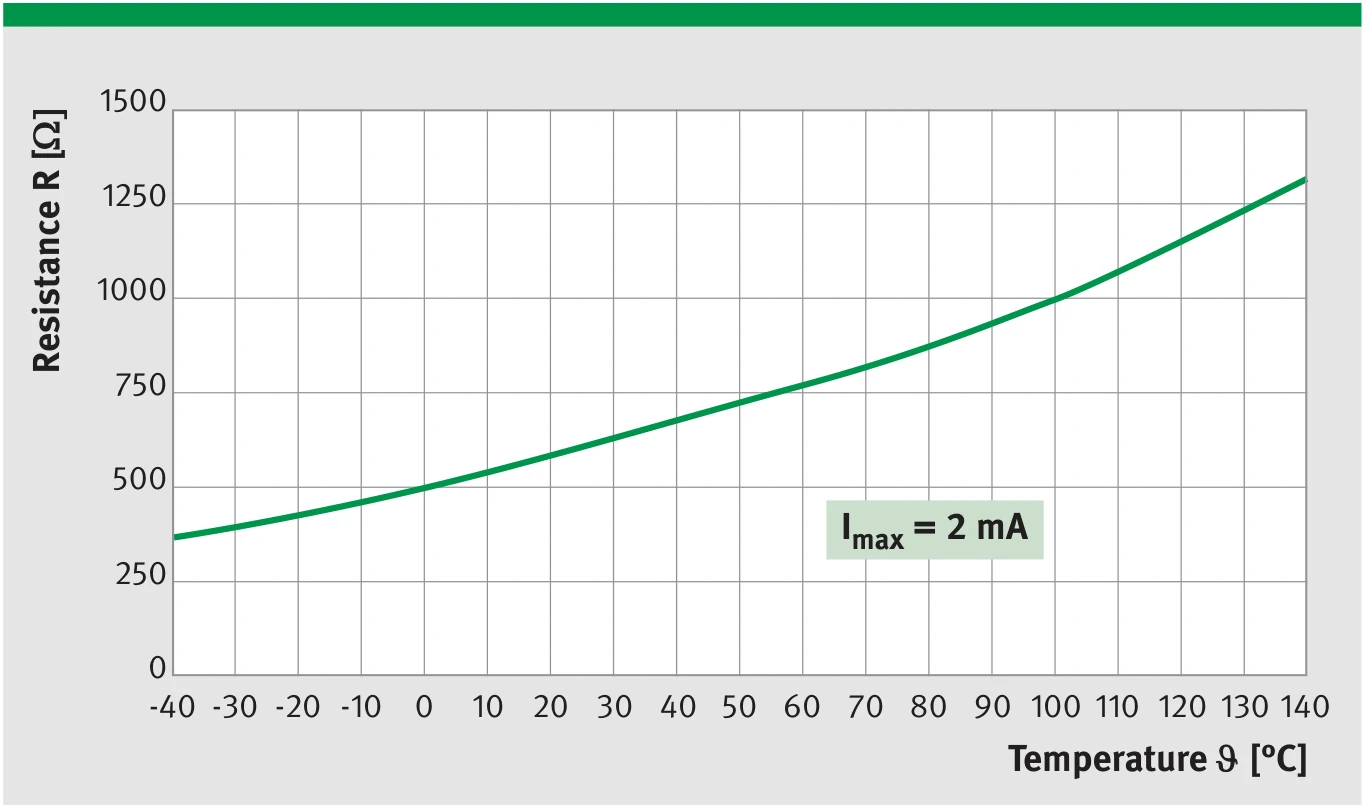
Đặc tính điện trở-nhiệt độ cảm biến KTY84-130: hệ số nhiệt dương tuyến tính để đo nhiệt độ dây quấn chính xác
Kết nối tiêu chuẩn PTC và KTY
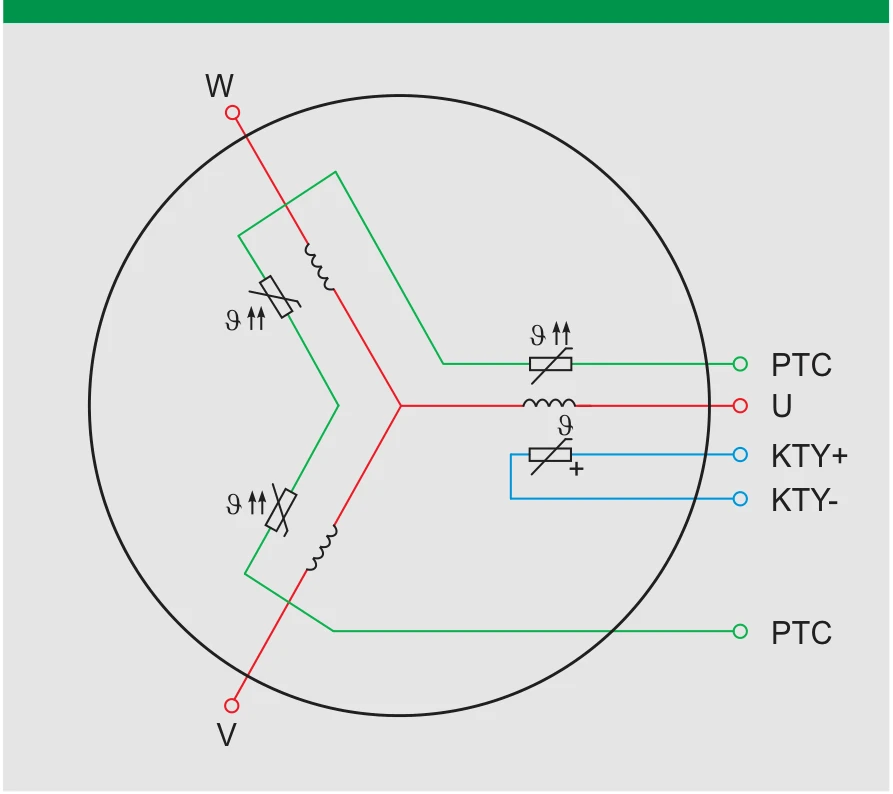
Kết nối tiêu chuẩn PTC và KTY: Cảm biến PTC nối tiếp trong cả ba cuộn dây pha; cảm biến KTY kết nối với một cuộn dây
Cảm biến PTC và KTY có cách điện cơ bản và không phù hợp để kết nối trực tiếp với mạch PELV/SELV (theo tiêu chuẩn DIN EN 50178).
Có thể tích hợp thêm cảm biến giám sát theo yêu cầu của khách hàng.
Kết nối điện
Kết nối tiêu chuẩn cho động cơ IDAM thoát ra từ mặt đầu. Chiều dài cáp tiêu chuẩn từ điểm thoát cáp trên động cơ là 1000 mm. Các chiều dài khác có thể được cung cấp theo yêu cầu. Tiết diện cáp nguồn phụ thuộc vào dòng điện liên tục của động cơ và được ghi lại trong bản vẽ danh mục. Theo tiêu chuẩn, L1A và L1B được tính toán cho dòng điện liên tục làm mát tự nhiên Ic ở tổn hao công suất Pl, trong khi L1C được tính toán cho dòng điện liên tục làm mát bằng nước Icw ở tổn hao công suất Plcw.
Tiết diện cáp động cơ bắt đầu từ 4G0.75 mm². Cáp cảm biến 4 × 0.14 mm² (d = 5.1 mm) cho phép giám sát nhiệt độ qua PTC và KTY. Các đầu cáp để hở với ống bọc đầu. Các cáp được sử dụng được chứng nhận UL và phù hợp cho bộ dẫn cáp.
Phiên bản động cơ với đầu cọc (khối đầu cọc WAGO Series 236, phù hợp cho tiết diện dây lên tới 1.5 mm²) có sẵn như một lựa chọn thay thế cho ống bọc đầu. Vị trí của đầu ra cáp hoặc đầu cọc được chỉ ra trong bảng dữ liệu. Đối với các biến thể không có làm mát bằng nước và dòng điện liên tục không vượt quá 16 A, việc sử dụng đầu cọc không bị hạn chế.
Gán đầu cọc
Đầu cọc động cơ
| Lõi | Số đầu cọc | Chức năng |
|---|---|---|
| U | 1 | Pha U |
| VV | 2 | Pha V |
| WWW | 3 | Pha W |
| GNYE | 4 | PE (Đất bảo vệ) |
| BK | — | Chắn |
Đầu cọc cảm biến
| Lõi | Số đầu cọc | Chức năng |
|---|---|---|
| WH | 7 | PTC |
| BN | 8 | PTC |
| GN | 5 | + KTY |
| YE | 6 | - KTY |
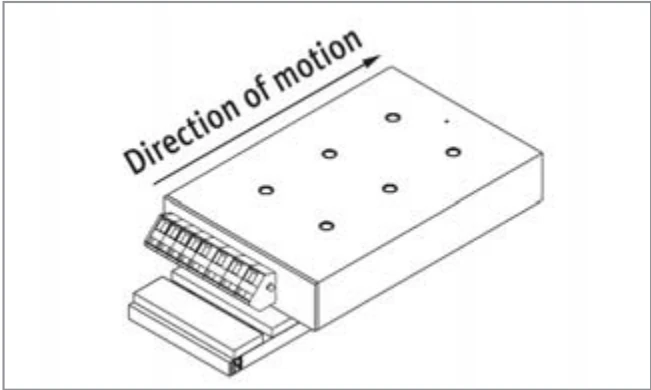
Chiều chuyển động dương
Trong tất cả các động cơ ba pha, chiều chuyển động dương về điện tương ứng với trường quay theo chiều kim đồng hồ, tức là điện áp pha được cảm ứng theo thứ tự U, V, W. Đối với động cơ IDAM, chiều chuyển động dương là:
- Hướng về phía không có cáp (phiên bản cáp)
- Hướng về phía không có đầu cọc (phiên bản đầu cọc)
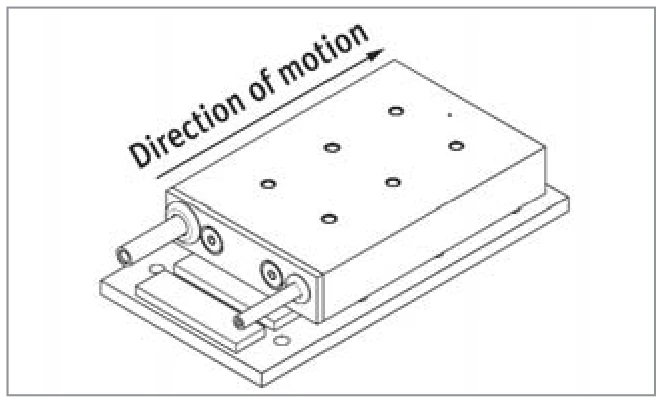
Phiên bản cáp: chiều dương hướng về phía không có cáp
Phiên bản đầu cọc: chiều dương hướng về phía không có đầu cọc
Lựa chọn cáp động cơ
| Dòng điện liên tục I [A] | Tiết diện cáp [mm²] | Đường kính dk [mm] | Bán kính uốn động rd [mm] | Bán kính uốn tĩnh rs [mm] |
|---|---|---|---|---|
| ≤9 | 0.75 | 7.3 | 73 | 44 |
| ≤16 | 1.5 | 10 | 100 | 60 |
| ≤22 | 2.5 | 11.6 | 120 | 70 |
Chuyển mạch
Vận hành chuyển mạch được ưu tiên cho các động cơ đồng bộ. Động cơ tuyến tính IDAM không được trang bị cảm biến Hall theo tiêu chuẩn. IDAM khuyến nghị sử dụng hệ thống đo để chuyển mạch.
Phương pháp chuyển mạch
Động cơ đồng bộ phát hiện vị trí rotor qua hệ thống đo (chẳng hạn encoder tuyến tính) và kiểm soát thời điểm chuyển đổi dòng điện pha tương ứng. So với chuyển mạch sáu bước của cảm biến Hall, chuyển mạch hệ thống đo đạt được điều khiển dòng điện hình sin mượt mà hơn, dẫn đến lực gợn thấp hơn và độ chính xác định vị cao hơn.
Điện trở cách điện
Điện trở cách điện cho điện áp bus không vượt quá 600 VDC
Động cơ IDAM tuân thủ Chỉ thị EC 73/23/EEC và các Tiêu chuẩn Châu Âu EN 50178 và EN 60204. Chúng được kiểm tra điện áp cao theo giai đoạn trước khi giao hàng và được tẩm chân không.
Vui lòng đảm bảo điện áp vận hành định mức của động cơ được tuân thủ.
Quá điện áp đầu cọc động cơ trong vận hành biến tần
Do tải du/dt cao được tạo ra bởi các bán dẫn công suất chuyển mạch nhanh, các đỉnh điện áp cao hơn đáng kể so với điện áp biến tần thực tế có thể xuất hiện tại đầu cọc động cơ, đặc biệt khi sử dụng cáp kết nối dài hơn (trên 5 m). Điều này đặt tải trọng rất cao lên cách điện động cơ.
Giá trị du/dt của mô-đun PWM không được vượt quá 8 kV/µs. Cáp kết nối động cơ nên được giữ càng ngắn càng tốt.
Để bảo vệ động cơ, khuyến nghị luôn đo điện áp biến tần (PWM) được áp dụng lên dây quấn động cơ so với PE bằng oscilloscope trong cấu hình cụ thể. Các đỉnh điện áp hiện có không nên vượt quá 1 kV đáng kể. Từ khoảng 2 kV, nên dự kiến hư hỏng cách điện dần dần.
Các kỹ sư IDAM sẽ hỗ trợ bạn xác định giải pháp ứng dụng và giảm điện áp quá cao.
Vui lòng tuân thủ các khuyến nghị và hướng dẫn cấu hình do nhà sản xuất biến tần cung cấp.
Làm mát và mạch làm mát
Tổn hao công suất và tổn hao nhiệt
Ngoài các tổn hao công suất được xác định bởi hằng số động cơ km, động cơ cũng chịu tổn hao phụ thuộc tần số ở tần số điều khiển cao hơn (trên 50 Hz). Các tổn hao này cùng nhau gây ra sự nóng lên của động cơ và các thành phần hệ thống khác.
Quy tắc sau áp dụng cho tần số điều khiển thấp (<80 Hz): Động cơ có hằng số động cơ km cao hơn tạo ra tổn hao công suất thấp hơn so với các động cơ tương đương có km thấp hơn.
Các tổn hao công suất được tạo ra trong quá trình vận hành được truyền qua cụm động cơ đến các thành phần được kết nối. Toàn bộ hệ thống được thiết kế cẩn thận để kiểm soát phân phối nhiệt thông qua đối lưu, dẫn nhiệt và bức xạ.
Đối với động cơ L1C, hệ thống làm mát có thể được chọn tùy chọn như phụ kiện để cải thiện tản nhiệt. Lực liên tục của động cơ làm mát bằng chất lỏng xấp xỉ gấp đôi so với động cơ không làm mát.
Làm mát chủ động
Làm mát chủ động nên được ưu tiên cho các máy hoạt động ở điều kiện hiệu suất cao và động học cao, cũng như trong các ứng dụng tải vòng bi cao tương ứng.
Nếu cần cách ly nhiệt hoàn toàn giữa động cơ và máy (ví dụ: để ngăn biến dạng nhiệt trong máy độ chính xác cao), cần có thêm lớp cách nhiệt và làm mát chính xác. Việc làm mát thực sự cấu thành hệ thống làm mát chính hoặc công suất.
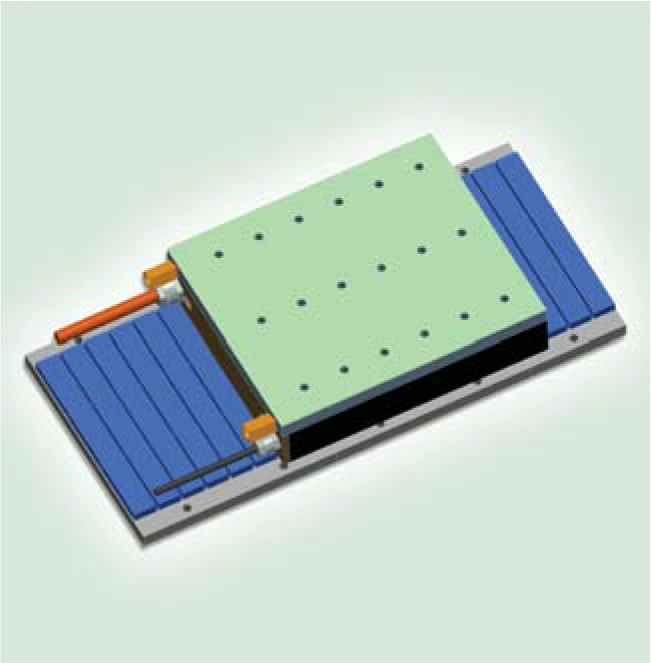
Tấm làm mát
Hệ thống làm mát động cơ được thực hiện dưới dạng tấm làm mát lắp đặt giữa động cơ và bàn máy, phải được khách hàng kết nối với mạch làm mát của thiết bị làm mát. Lớp cách nhiệt và tấm làm mát có thể được cung cấp như phụ kiện tùy chọn cho các thành phần động cơ hoặc như một phần của thiết kế máy của khách hàng.
Môi chất làm mát chảy qua các ống đồng bên trong từ đầu vào đến đầu ra. Kết nối đầu vào và đầu ra có thể được phân phối đến hai cổng, với phụ kiện kết nối ren trong G 1/8.
Khi sử dụng nước làm chất làm mát, phải thêm các chất phụ gia chống ăn mòn và lắng đọng sinh học.
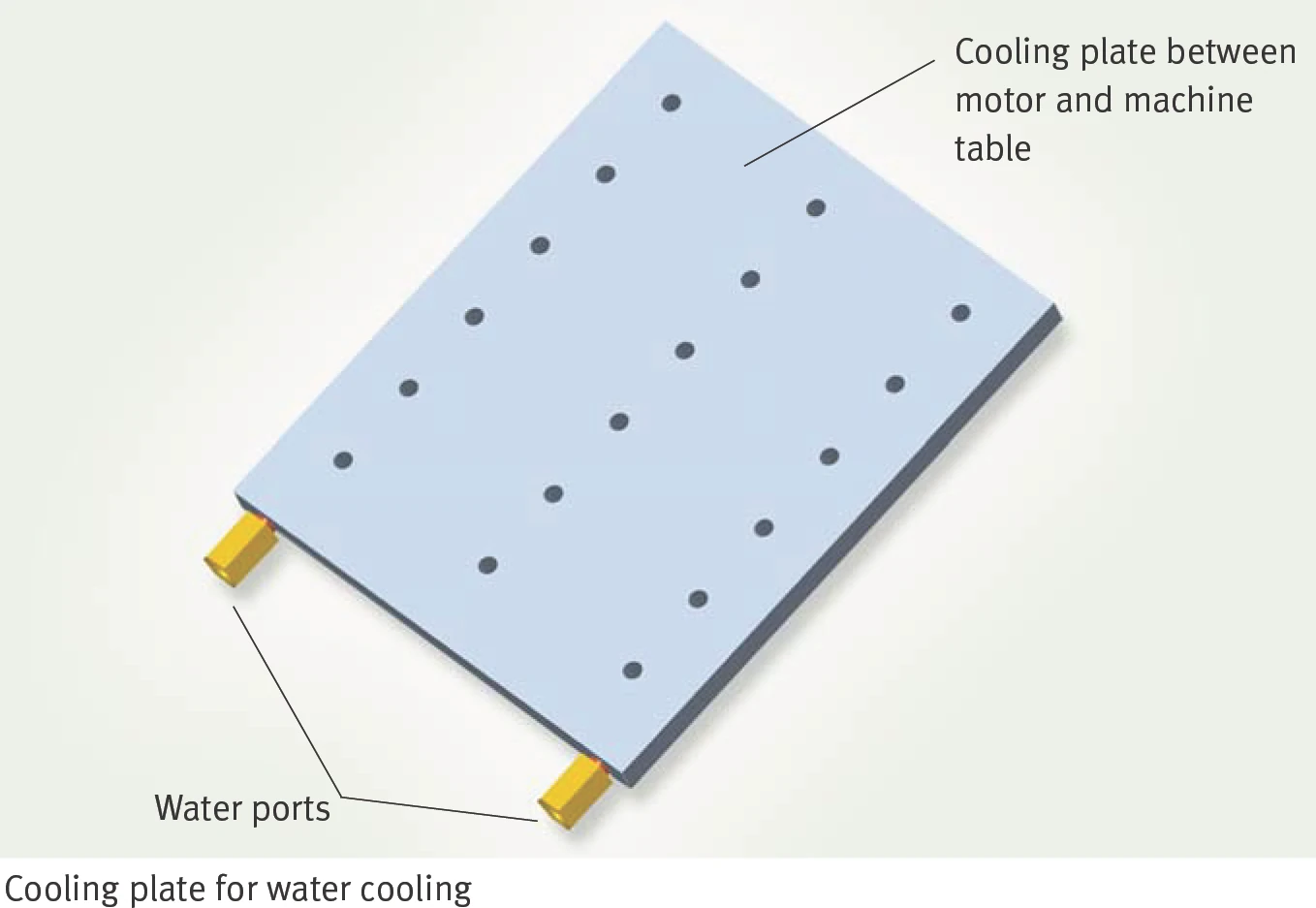
Tấm làm mát bằng nước
Tấm làm mát được lắp đặt giữa động cơ và bàn máy
Sự phụ thuộc của dữ liệu đặc tính vào nhiệt độ cấp của môi chất làm mát
Dòng điện liên tục làm mát bằng nước Icw được ghi trong bảng dữ liệu có thể đạt được ở nhiệt độ cấp định mức θnV = 25 °C. Nhiệt độ cấp θV cao hơn sẽ làm giảm hiệu suất làm mát và do đó cũng giảm dòng điện định mức.
Dòng điện liên tục giảm Ic red có thể được tính theo phương trình bậc hai sau:
Ic red / Icw = √((θmax − θV) / (θmax − θnV))
- Ic red: Dòng điện liên tục giảm [A]
- Icw: Dòng điện liên tục làm mát tại θnV [A]
- θV: Nhiệt độ cấp thực tế [°C]
- θnV: Nhiệt độ cấp định mức [°C]
- θmax: Nhiệt độ cuộn dây tối đa cho phép [°C]
(Áp dụng cho điều kiện dòng điện động cơ không đổi)
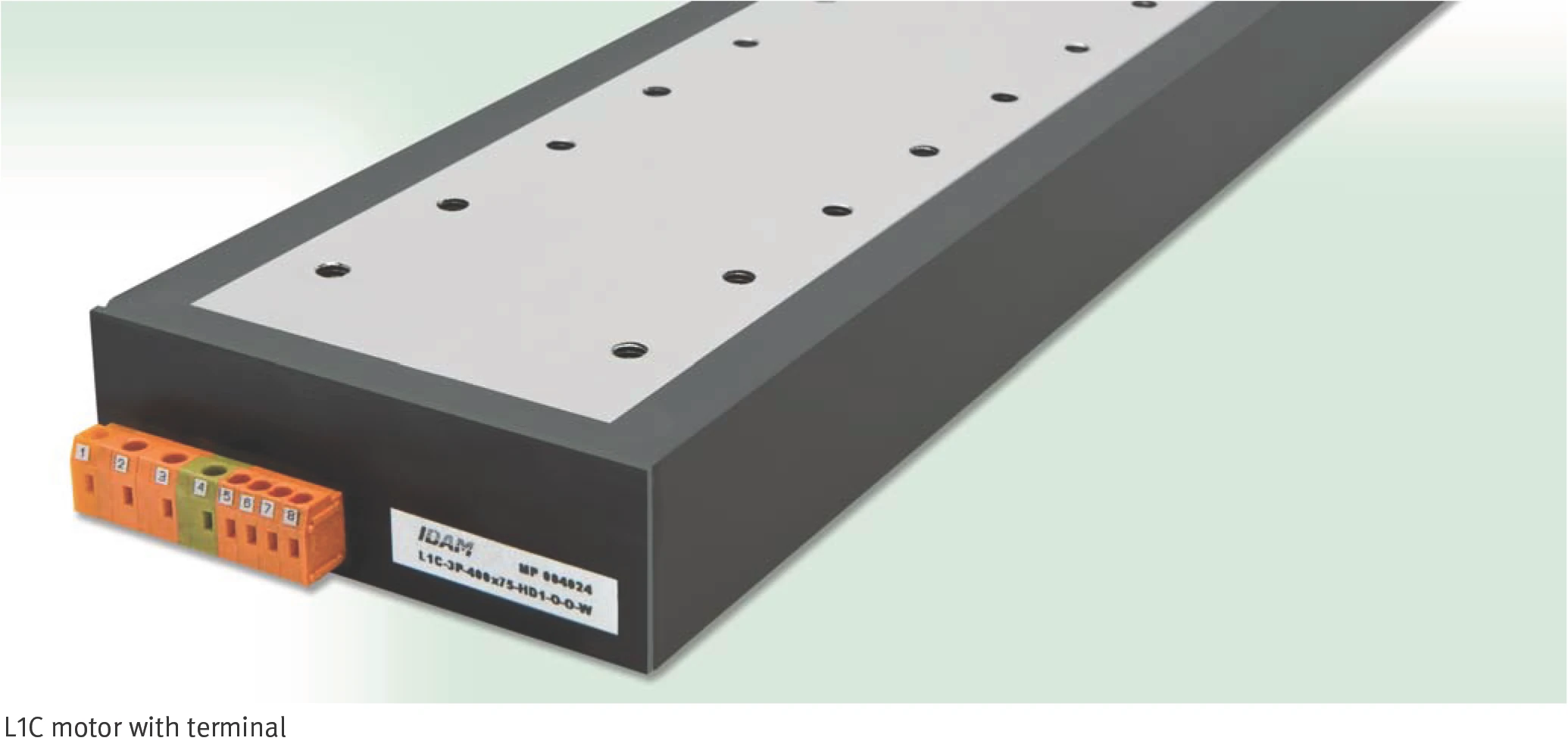
Động cơ L1C loại đầu nối
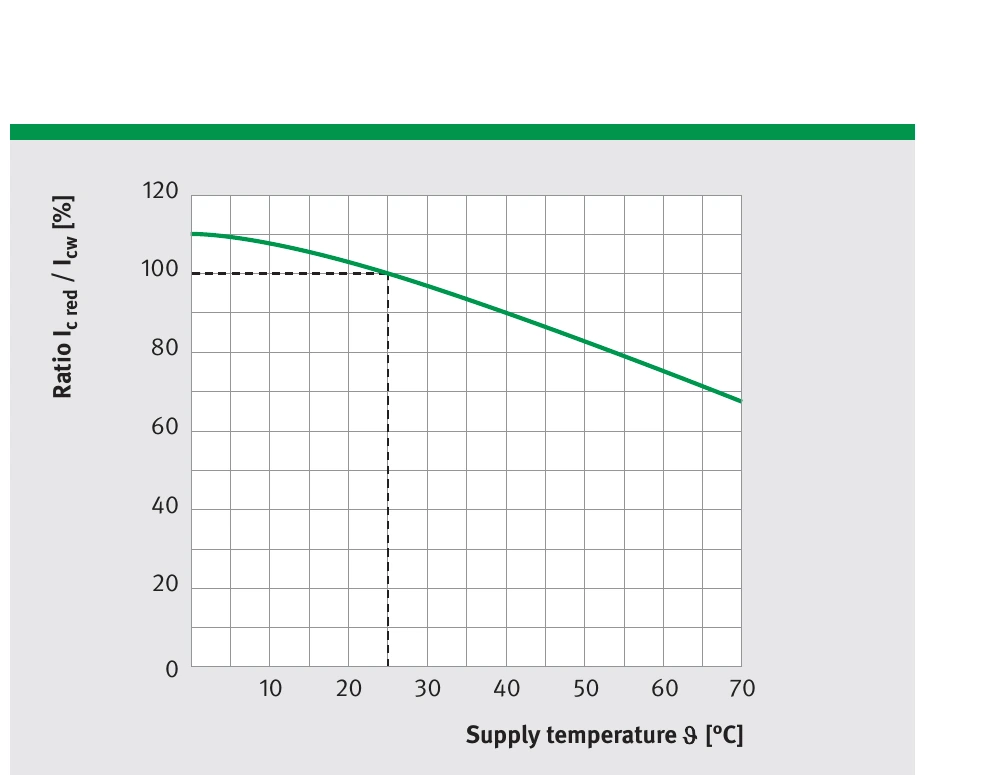
Đặc tính dòng điện liên tục tương đối Ic red / Icw theo nhiệt độ cấp θV (θnV = 25 °C)
Lựa chọn truyền động trực tiếp cho chuyển động tuyến tính
Ứng dụng theo chu kỳ
Trong vận hành chu kỳ, các chuyển động định vị liên tục xen kẽ với các khoảng dừng. Một trình tự định vị đơn giản có dạng chuyển động tăng tốc dương tiếp theo là giảm tốc thường có cùng độ lớn (tăng tốc âm), với thời gian tăng tốc và giảm tốc bằng nhau. Tốc độ tối đa vmax đạt được vào cuối pha tăng tốc.
Một chu kỳ được mô tả trong sơ đồ v(t) (v: vận tốc, t: thời gian). Sơ đồ cho thấy chuyển động tiến-lùi với các khoảng dừng (tM: thời gian chuyển động, tP: thời gian dừng không tải).
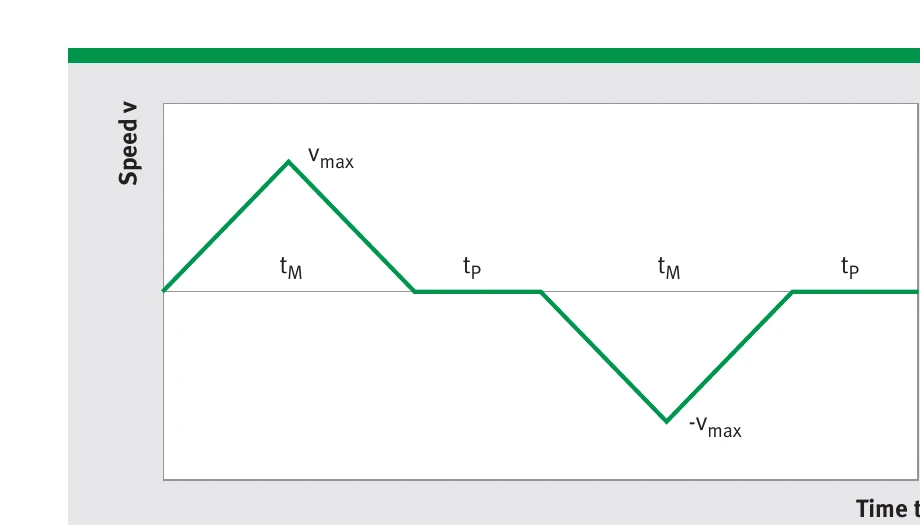
Biểu đồ v-t cho hoạt động có chu kỳ
Từ đó, sơ đồ a(t) và đường cong lực cần thiết cho chuyển động có thể được suy ra:
F = m × a
- F: Lực [N]
- m: Khối lượng [kg]
- a: Gia tốc [m/s²]
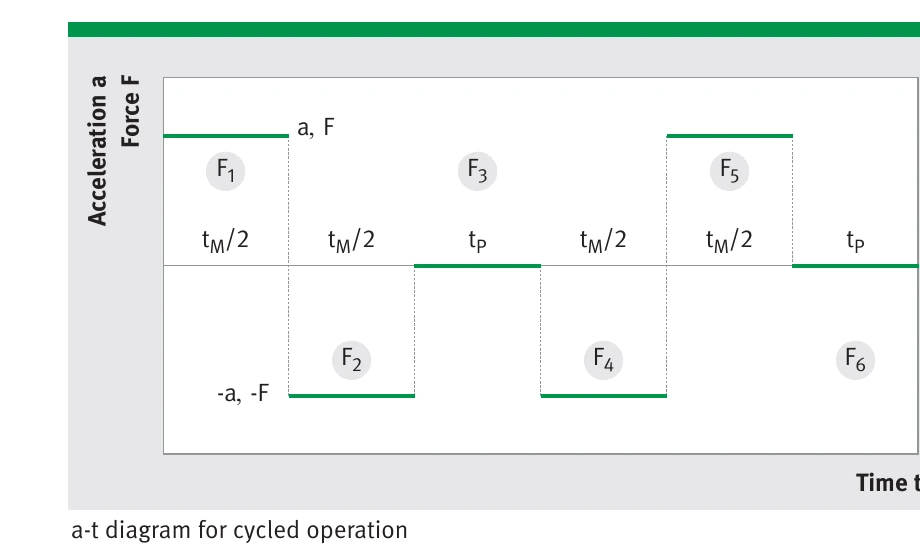
Biểu đồ a(t) cho hoạt động có chu kỳ
Ba tiêu chí lựa chọn
Động cơ được lựa chọn theo ba tiêu chí phù hợp với đường cong lực của chu kỳ mong muốn:
- Lực tối đa: Lực tối đa trong chu kỳ ≤ Fp theo bảng dữ liệu
- Lực hiệu dụng: Lực hiệu dụng trong chu kỳ ≤ Fc (không làm mát) hoặc Fcw (làm mát bằng nước) theo bảng dữ liệu
- Tốc độ tối đa: Tốc độ tối đa trong chu kỳ ≤ vlp theo bảng dữ liệu
Tính lực hiệu dụng
Lực hiệu dụng bằng giá trị bình phương trung bình (RMS) của đường cong lực trong chu kỳ (ví dụ: sáu đoạn lực):
Feff = √[(F1²·t1 + F2²·t2 + F3²·t3 + F4²·t4 + F5²·t5 + F6²·t6) / (t1+t2+t3+t4+t5+t6)]
Thay các giá trị lực F₁=F, F₂=-F, F₃=0, F₄=-F, F₅=F, F₆=0 và thời gian t₁=tM/2, t₂=tM/2, t₃=tP, t₄=tM/2, t₅=tM/2, t₆=tP, công thức đơn giản thành:
Feff = F · √[tM / (tM + tP)]
Công thức này chỉ áp dụng khi tất cả các lực trong chu kỳ có cùng độ lớn (khối lượng và gia tốc không đổi). Mẫu số là thời gian chu kỳ (thời gian chuyển động + thời gian dừng).
Hệ số an toàn 1.4 trong ví dụ tính toán (trang 19) cũng tính đến hoạt động của động cơ trong vùng phi tuyến của đặc tính lực-dòng điện, trong đó công thức tính F_eff chỉ là xấp xỉ.
Gia tốc và tốc độ tối đa
a = 4 · x / tM²
vmax = 2 · x / tM
- x: Hành trình tổng cộng [m]
- tM: Thời gian chuyển động [s]
- a: Gia tốc [m/s²]
- vmax: Tốc độ tối đa [m/s]
Chuyển động định vị được thực hiện với tốc độ biến thiên gia tốc (jerk) lý thuyết vô hạn. Nếu bộ biến tần servo được lập trình giới hạn jerk, thời gian định vị sẽ bị kéo dài tương ứng. Trong trường hợp đó, cần gia tốc lớn hơn để duy trì thời gian định vị không thay đổi.
Ví dụ: Ứng dụng theo chu kỳ
| Giá trị đặt sẵn | Kết quả tính toán | ||
|---|---|---|---|
| Hành trình tổng cộng | x = 0.7 m | Tốc độ tối đa | vmax = 4.67 m/s |
| Khối lượng | m = 10 kg | Gia tốc | a = 31.1 m/s² |
| Thời gian chuyển động | tM = 0.3 s | Lực tối đa | Fmax = 442.4 N |
| Lực ma sát | FR = 5 N | Lực hiệu dụng | Feff = 216.2 N |
| Thời gian chu kỳ | tC = 1.3 s | ||
| Hệ số an toàn | S = 1.4 | ||
Lựa chọn động cơ — Không làm mát
L1A-3P-200-75-WM
Điều kiện: Fmax ≤ Fp và Feff ≤ Fc
Tốc độ yêu cầu có thể đạt được với điện áp DC link 600 V.
Lựa chọn động cơ — Làm mát bằng nước
L1C-3P-100-75-WM
Điều kiện: Fmax ≤ Fp và Feff ≤ Fcw
Tấm làm mát tăng khối lượng được gia tốc khoảng 500 g (đã tính). Tốc độ yêu cầu có thể đạt được với điện áp DC link 600 V.