리니어 구동 장점
성능
- 운동 변환 불필요
- 구동 시스템에 전동 또는 커플링 요소로 인한 탄성, 백래시, 마찰, 히스테리시스가 없습니다.
- 소형 모터
- 낮은 가속 질량 대비 높은 이송력 덕분에 극히 높은 가속 성능을 달성할 수 있습니다. 영속도부터 최대 속도까지 전 범위에서 사용 가능합니다.
- 직접 위치 측정
- 직접 위치 측정과 강성 기계 구조를 통해 위치 결정 과정이 고동적이며 정밀합니다.
운용 비용
- 추가 가동 부품 없음
- 구동 부품의 조립, 조정, 유지보수 작업이 크게 줄어듭니다.
- 구동 시스템 무마모
- 고교번 하중에서도 구동 시스템이 매우 내구성이 높습니다. 이로 인해 기계 다운타임이 크게 감소합니다.
- 높은 가용성
- 긴 사용 수명 및 마모 감소 외에도 리니어 모터의 견고성이 시스템 가용성을 향상시킵니다.
- 구동 시스템의 기계적 과부하가 기어 모터처럼 손상을 일으키지 않습니다.
설계
- 소형 설치 공간
- 소형 설계로 구동 모듈의 공간 요구가 줄어듭니다.
- 부품 수 적음
- 검증된 설계로 모터 부품을 전체 기계 개념에 통합하기가 용이합니다.
- 더 적고 더 견고한 부품으로 낮은 고장률(높은 MTBF*)을 실현합니다.
- 다양한 설계 변형
- 모터 부품을 전체 기계 설계 개념에 최적으로 통합하는 데 도움이 됩니다.
*MTBF: Mean Time Between Failures (평균 고장 간격 시간)
리니어 모터 특성
리니어 구동은 운동 변환기나 중간 기어 없이 선형 운동을 구현합니다.
리니어 모터는 Primary Part(가동자)와 Secondary Part(고정자)로 구성됩니다. Primary Part에는 권선 코일이 있으며, Secondary Part는 Primary Part 맞은편에 배열된 영구자석 세트로 이루어집니다. 모터 타입은 유철심형(slotted), 무철심형(slotless), 아이언리스형(ironless), 스텝 모터(동기 자기 저항 하이브리드 모터)로 분류됩니다.
모터는 특정 속도 범위 내에서 균일하고 전형적인 힘을 발생시킵니다. 힘의 크기는 Primary Part와 Secondary Part 사이의 유효 공극 면적에 의해 결정됩니다.
Primary Part에 전류가 인가되면 권선 코일 주변의 전자기장이 Secondary Part에 작용하는 힘을 발생시켜 선형 운동을 만들어 냅니다.
리니어 축 시스템에는 Primary Part와 Secondary Part 사이의 공극을 유지하기 위한 적절한 가이드 시스템과 모터 위치를 검출하기 위한 리니어 측정 시스템이 필요합니다.
각 모터 시리즈는 다양한 힘 및 설치 요구에 맞는 다양한 길이와 폭 옵션을 포함하며, 여러 설치 및 연결 변형을 제공합니다.
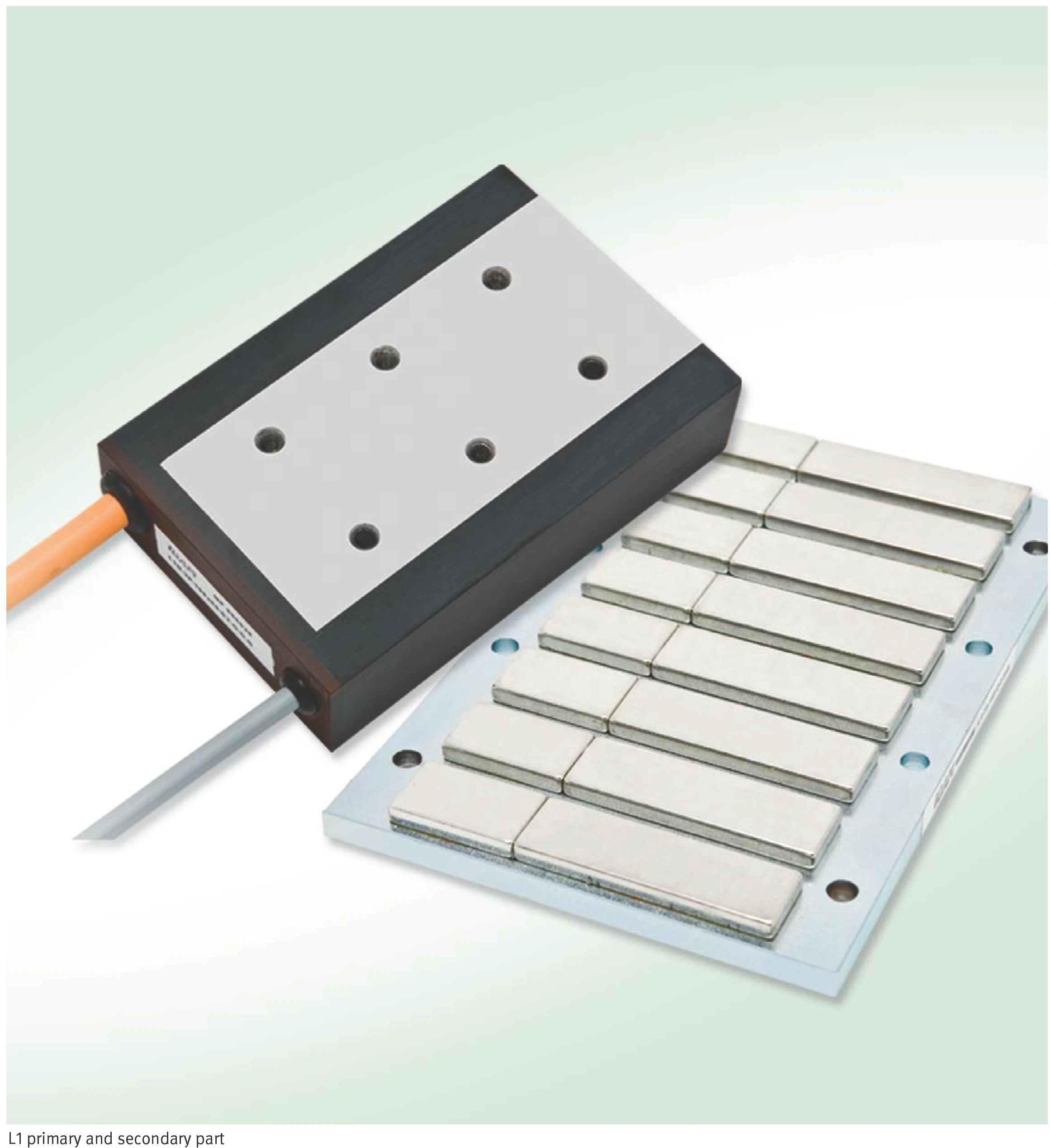
L1 리니어 모터: Primary Part(가동자)와 Secondary Part(고정자)
리니어 모터 시리즈 개요
유철심형 모터 (Slotted Motors)
| 모터 타입 | 특성 |
|---|---|
| L1A 시리즈 | 최대력 최대 1010 N|탁월한 추력/질량비|수직 설치 공간이 제한된 자동화 응용에 적합 |
| L1B 시리즈 | 최대력 최대 1521 N|최적화된 열손실|높은 이송력이 요구되는 자동화 응용에 적합 |
| L1C 시리즈 | 최대력 최대 5171 N|최적화된 열손실|수냉식|공작기계 등의 응용에 적합 |
| L2U 시리즈 | 최대력 최대 12000 N|이중 빗살 구조|탁월한 추력/체적비|긴 수명/고동적 성능|냉각 옵션|등속|자기 흡인력 중화|공작기계 등의 응용에 적합 |
저철심형 모터 / 무슬롯형 (Low-Iron Motors, Slotless)
| 모터 타입 | 특성 |
|---|---|
| FSM 시리즈 | 평탄한 설계|최소화된 리플력|고동적 성능 및 고정밀|측정기 응용에 적합 |
아이언리스형 모터 (Ironless Motors)
| 모터 타입 | 특성 |
|---|---|
| ULIM 시리즈 | 우수한 동적 성능|등속|소형 설계|인쇄기 및 전자제품 응용에 적합 |
자기 저항 모터 (Reluctance Motors)
| 모터 타입 | 특성 |
|---|---|
| LRAM | 스텝 모터|무마모|정밀 에어 베어링|전자제품의 픽앤플레이스 응용에 적합|저질량 응용에 적합 |
모터 파라미터 — 효율 기준
모터 크기에 따라, 힘과 공정에서 다양한 동작점에서 발생하는 전력 손실(동손)은 고정되어 있으며 권선 설계와 무관합니다. 리니어 모터는 정지 상태에서 기계적 출력을 내지 않기 때문에, 여기서 효율 계수를 인용하는 것은 의미가 없습니다.
전력 손실 공식
전류가 홀딩력 또는 이송력으로 변환될 때, 부하 독립 전류의 제곱에 비례하는 전력 손실 또는 가열이 발생합니다. 이 관계는 선형 동적 범위와 실온에서의 정적 동작에서 성립합니다.
Pl = (F / km)2
- Pl: 전력 손실 [W]
- F: 힘 [N]
- km: 모터 상수 [N/√W]
모터 상수 km은 서로 다른 모터의 효율을 비교하는 수단으로 사용할 수 있습니다. 모터 상수가 높을수록 전력 손실 대비 힘의 변환 효율이 더 높습니다.
km과 온도의 관계
모터 상수 km은 옴 저항에 따라 달라지므로 모터 권선 온도에도 영향을 받습니다. 모터 기술 데이터에서 km은 25°C를 기준값으로 합니다.
아래 그림은 기준 모터 상수와 온도 사이의 의존 관계를 보여줍니다: 권선 온도 100°C에서 km은 25°C 값의 약 88%로 감소합니다.
고속 주의사항
속도가 증가함에 따라 전력 손실 Pl은 주파수에 따른 자기 반전 손실 및 와전류 손실의 영향도 추가로 받습니다. 이 손실들은 모터 상수 km에 포함되지 않지만 한계 속도 범위에서는 유의미해지므로 반드시 고려해야 합니다. 모터 상수 km은 힘-전류 특성의 선형 영역에서만 유효합니다.
권선 설계와 의존성
리니어 모터의 달성 가능한 한계 속도는 주로 권선 설계와 DC 버스 전압(UDCL)에 따라 결정됩니다. 모터 내부 전압 강하는 속도가 증가함에 따라 상승합니다. 지정된 한계 속도에서 자기장 지향 제어를 위한 전압 요구는 서보 컨버터의 버스 전압에 해당합니다. 이 지점을 초과하면 속도가 급격히 떨어집니다.
버스 전압이 높을수록 권선 관련 전압 상수(ku)가 낮아지고, 달성 가능한 한계 속도가 높아집니다. 전압 상수와 힘 상수 사이의 관계로 인해, 동일한 힘에 대한 전류 요구가 증가함에 따라 힘 상수는 더 높은 속도에서 증가합니다.
권선 변형
권선 데이터에 있어, 각 모터 크기에는 표준 권선 WM(중간 동적 요구에 적합)이 사전 정의되어 있습니다. 더 낮거나 높은 동적 요구에 대해서는 권선 변형 WL과 WH가 추가로 제공됩니다.
- WL: 낮은 동적 요구 (낮은 버스 전압에서의 한계 속도가 대략 비례하여 감소)
- WM: 표준 동적 요구 (기본 권선)
- WH: 높은 동적 요구
힘-전류 특성은 다양한 동작점에서의 힘을 나타냅니다. 힘-속도 특성은 다양한 동작점에서 힘과 속도 사이의 관계를 보여줍니다.
L1 리니어 모터 시리즈
힘-속도 특성
영구자석 동기 모터의 F(v) 특성은 저속 구간에서 속도와 거의 무관합니다. 이는 Fp, Fcw, Fc가 각각의 코너 속도 vlp, vlcw, vlc에 이를 때까지 적용됩니다. 더 높은 속도에서는 역기전력(Back EMF*)의 영향으로 힘이 점진적으로 감소하여 결국 영이 됩니다.
더 높은 버스 전압은 더 큰 역기전력을 보상하여 더 높은 속도에 도달할 수 있게 합니다.
동작 조건
모터는 F(v) 특성 곡선 아래의 어떤 동작점에서도 동작할 수 있습니다:
- 비냉각 연속 운전에서는 힘이 Fc까지 도달 가능
- 수냉식 연속 운전에서는 힘이 Fcw까지 도달 가능
- 주기적 단속 운전(S3**)에서는 힘이 Fp까지 도달 가능
폐루프 제어 모터 운동에서는 잠재적 동작점과 F(v) 특성의 하강 구간 사이에 적절한 여유를 유지해야 합니다. 일반적으로 최대 속도의 약 0.2배가 제어 여유로 확보됩니다.
v = 0 m/s에서의 힘
정지 상태에서 연속력(Fs)을 사용할 때(예: 질량 보상 없는 Z축), 최대 70%의 정격력만 사용할 수 있습니다. 이 감율값을 초과하면 모터 국부 과부하가 발생할 수 있습니다.
Fs = 0.7 × Fc (또는 Fcw)
*Back EMF: 역기전력(Back Electromagnetic Force)
**S3: VDE 0530 표준에 따른 운전 모드
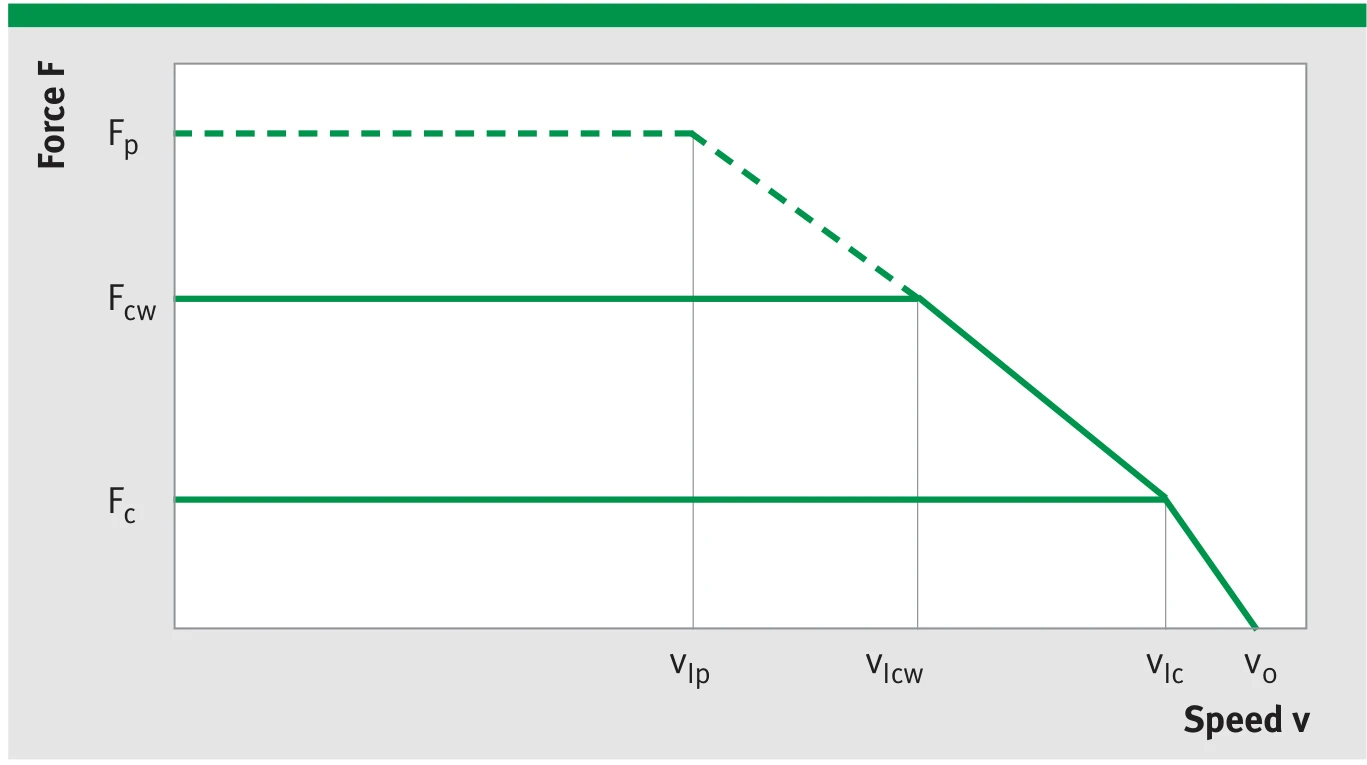
힘-속도 (F-v) 특성 곡선: Fp(최대력), Fcw(수냉 연속력), Fc(비냉각 연속력) 및 해당 코너 속도
힘-전류 특성
원점(0,0)에서 (Fpl, Ipl)까지의 특성 곡선은 힘 상수 kf로 정의되는 근사 선형 구간입니다:
F = I × kf
비냉각 운전의 동작점 (Fc, Ic)와 수냉 운전의 동작점 (Fcw, Icw)는 모두 이 선형 영역에 위치합니다.
포화 영역
높은 전류에서는 모터 자기 회로의 포화로 인해 힘-전류 특성의 비선형성이 발생합니다. 이 구간의 곡선은 데이터 시트와 다이어그램에서 힘-전류 동작점 (Fp, Ip)과 (Fu, Iu)으로 나타내며, 기울기는 kf보다 훨씬 완만합니다.
모터는 단시간(주기적으로 ≤3초) 동안 동작점 (Fp, Ip)에서 운전할 수 있으며, 평균 열 손실이 고려되어 있어야 합니다. 가속 과정에서는 이것이 사용할 수 있는 최대 동작점입니다.
한계점 (Fu, Iu)
한계점을 절대 초과해서는 안 됩니다. 그렇지 않으면 모터 과부하의 위험이 있습니다. 이 점은 단락 제동 고려에만 사용되며 선정 기준으로는 사용하지 않아야 합니다.
모든 파라미터는 용어집에서 설명됩니다.
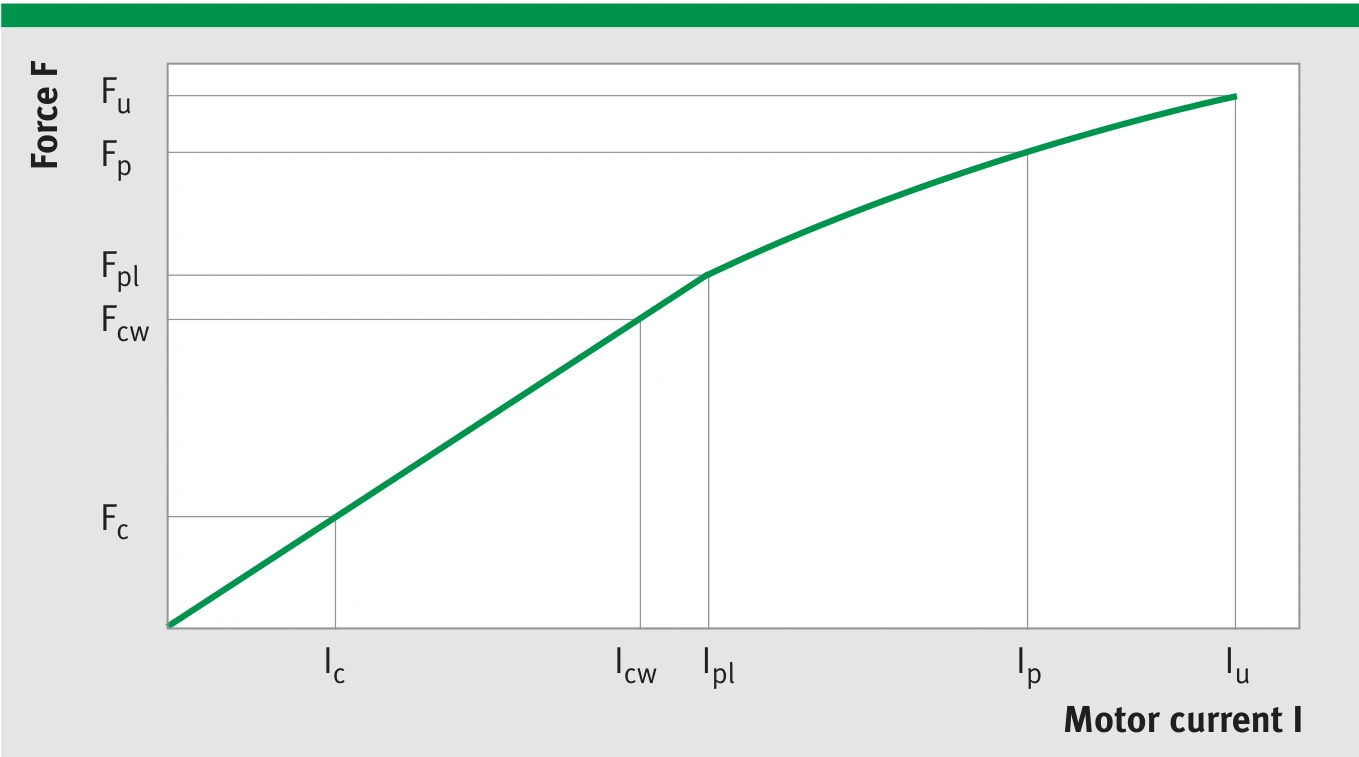
힘-전류 (F-I) 특성 곡선: 선형 영역(kf로 정의)과 포화 영역(Fp/Fu 동작점)
열 보호
리니어 구동은 종종 열 성능 한계 근처에서 운전됩니다. 또한 운전 중에 예기치 않은 과부하가 발생하여 전류가 허용 정격 전류를 초과할 수 있습니다. 따라서 모터용 서보 컨트롤러에는 일반적으로 모터 전류를 제어하기 위한 과부하 보호 기능이 장착되어야 합니다. 모터 전류의 RMS값이 허용 정격 전류를 단시간만 초과할 수 있도록 보장해야 합니다. 이 간접 온도 모니터링은 빠르고 신뢰성이 높습니다.
IDAM 모터에는 열 보호에 사용할 수 있는 온도 센서(PTC 및 KTY)가 장착되어 있습니다.
모니터링 회로 I — PTC 센서
세 개의 상 권선 각각에 직렬 연결된 PTC(양성 온도 계수 서미스터)가 장착되어 모터 보호를 보장합니다. PTC는 양성 온도 계수 서미스터로, 설치 후 열 시간 상수가 5초 미만입니다.
PTC 동작 원리
정격 응답 온도 Tn을 초과하면 PTC의 저항이 급격히 상승하여 냉태값의 수배로 증가합니다. 세 개의 PTC 소자가 직렬 연결되면, 하나의 소자만 Tn을 초과해도 전체 저항이 현저하게 변화합니다.
세 개의 센서를 사용하면 모터가 정지 상태에서 비대칭 상 부하가 있을 때도 안전 차단 신호가 발생합니다.
시판되는 모터 보호 트립 장치가 하류에 연결되며, 일반적으로 1.5 kΩ에서 3.5 kΩ 사이에서 트리거됩니다. 이를 통해 각 권선의 몇 도 이내에서 과온도를 감지할 수 있습니다.
트립 장치는 PTC 회로 저항이 너무 낮을 때도 반응하며, 이는 보통 모니터링 회로의 결함을 나타냅니다. 이는 컨트롤러와 모터 센서 사이의 전기적 절연도 보장합니다. 모터 보호 트립 장치는 공급 범위에 포함되지 않습니다.
원칙: PTC 센서 신호는 과온도 손상으로부터 모터를 보호하기 위해 반드시 모니터링해야 합니다.
PTC는 온도 측정에 적합하지 않습니다. 온도 측정이 필요한 경우 KTY 센서를 사용해야 합니다.
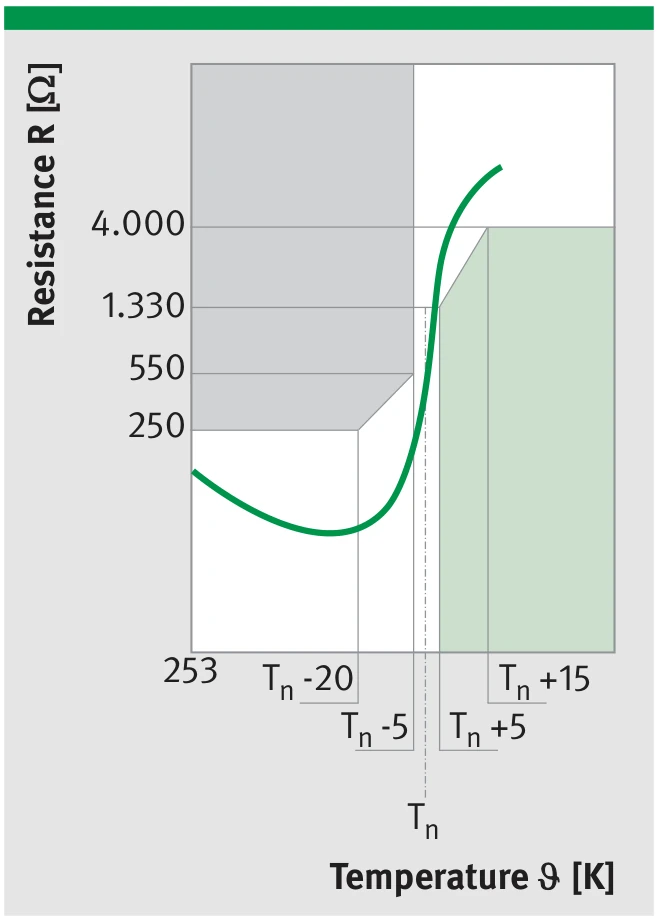
PTC 센서 저항-온도 특성: 정격 응답 온도 Tn 초과 시 저항이 급격히 상승
모니터링 회로 II — KTY84-130 센서
모터 상 중 하나에 KTY84-130 센서가 추가로 장착됩니다. 이는 양성 온도 계수를 가진 반도체 저항으로, 온도에 상응하는 신호를 생성합니다(모터 타입에 따른 지연 포함).
과온도로부터 모터를 보호하기 위해 컨트롤러에 차단 임계값이 설정됩니다. 모터가 정지 상태에 있을 때, 각 극 위치에 따라 권선에 일정한 전류가 흐릅니다. 따라서 모터는 균일하게 발열하지 않아 모니터링되지 않은 권선이 과열될 수 있습니다.
KTY 센서 용도
KTY 센서는 단일 권선을 모니터링합니다. 그 신호는 온도 관찰이나 경고 발생에 사용할 수 있습니다. KTY만을 차단 근거로 단독 사용하는 것은 허용되지 않습니다.
Imax = 2 mA
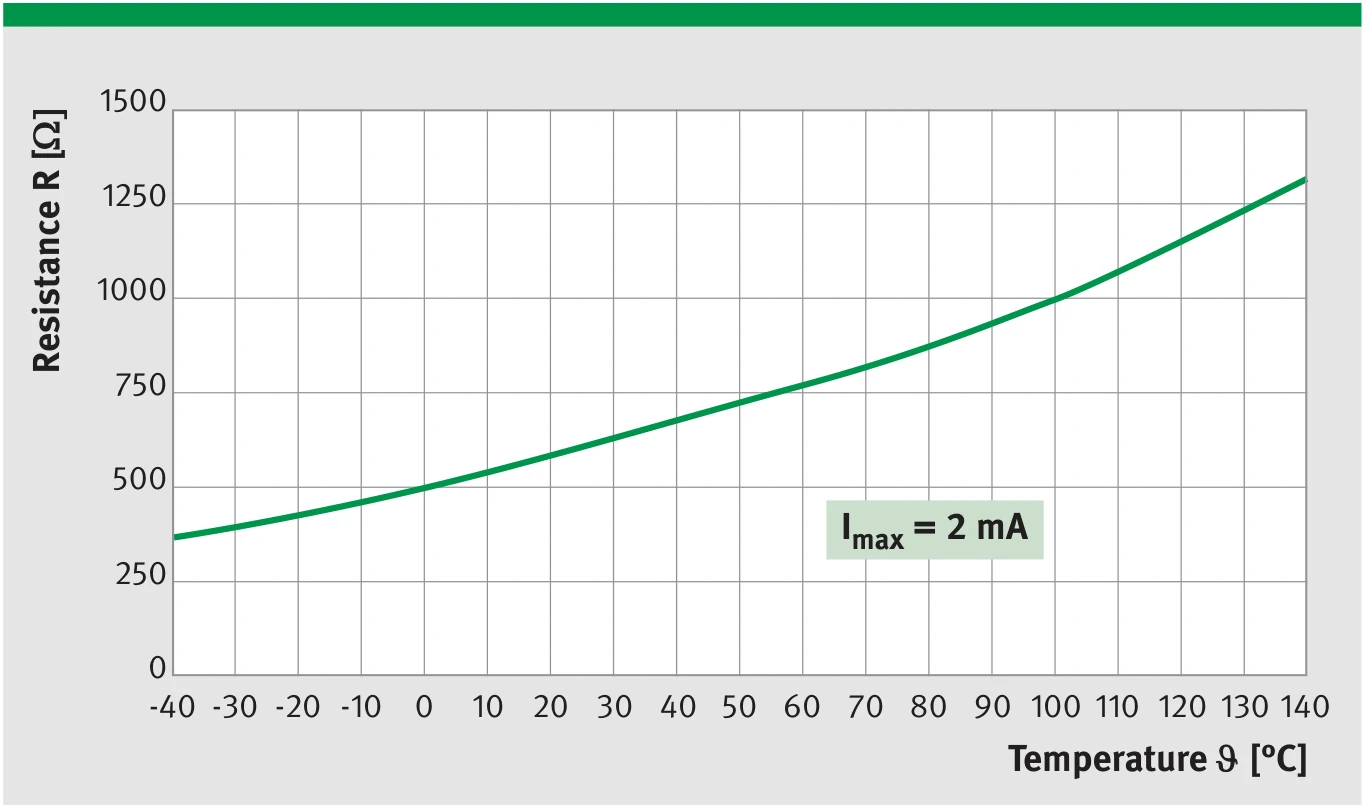
KTY84-130 센서 저항-온도 특성: 선형 양성 온도 계수로 권선 온도를 정밀 측정
PTC 및 KTY 표준 연결
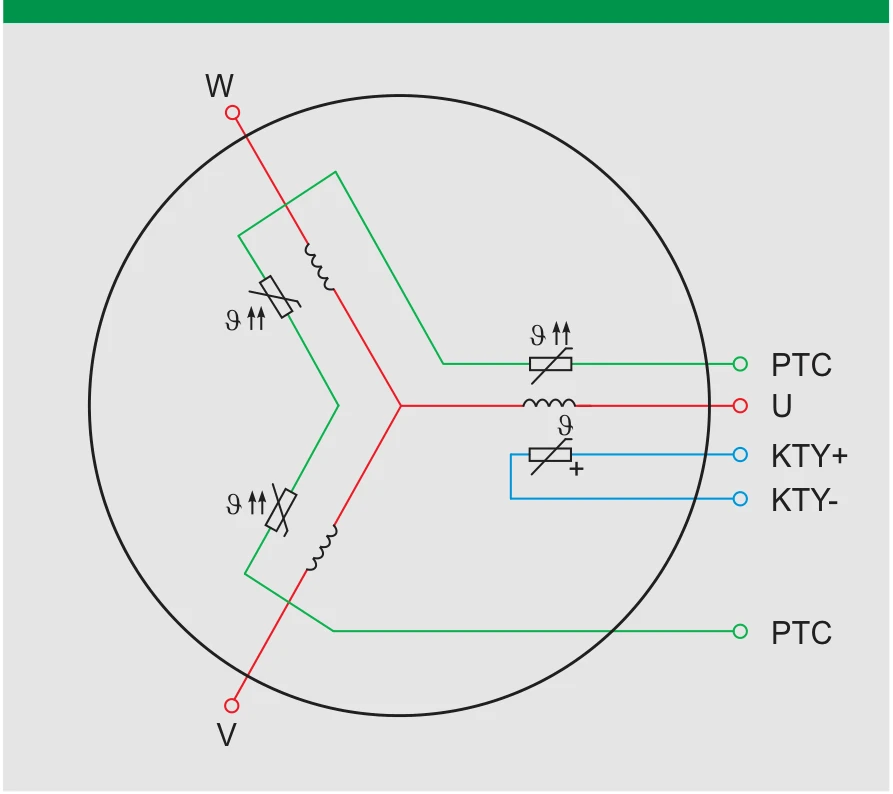
PTC 및 KTY 표준 연결: PTC 센서는 3상 권선 모두에 직렬 연결, KTY 센서는 1상 권선에 연결
PTC 및 KTY 센서는 기본 절연을 갖추고 있으며, DIN EN 50178 표준에 따라 PELV/SELV 회로에 직접 연결하기에는 적합하지 않습니다.
고객 요청에 따라 추가 모니터링 센서를 통합할 수 있습니다.
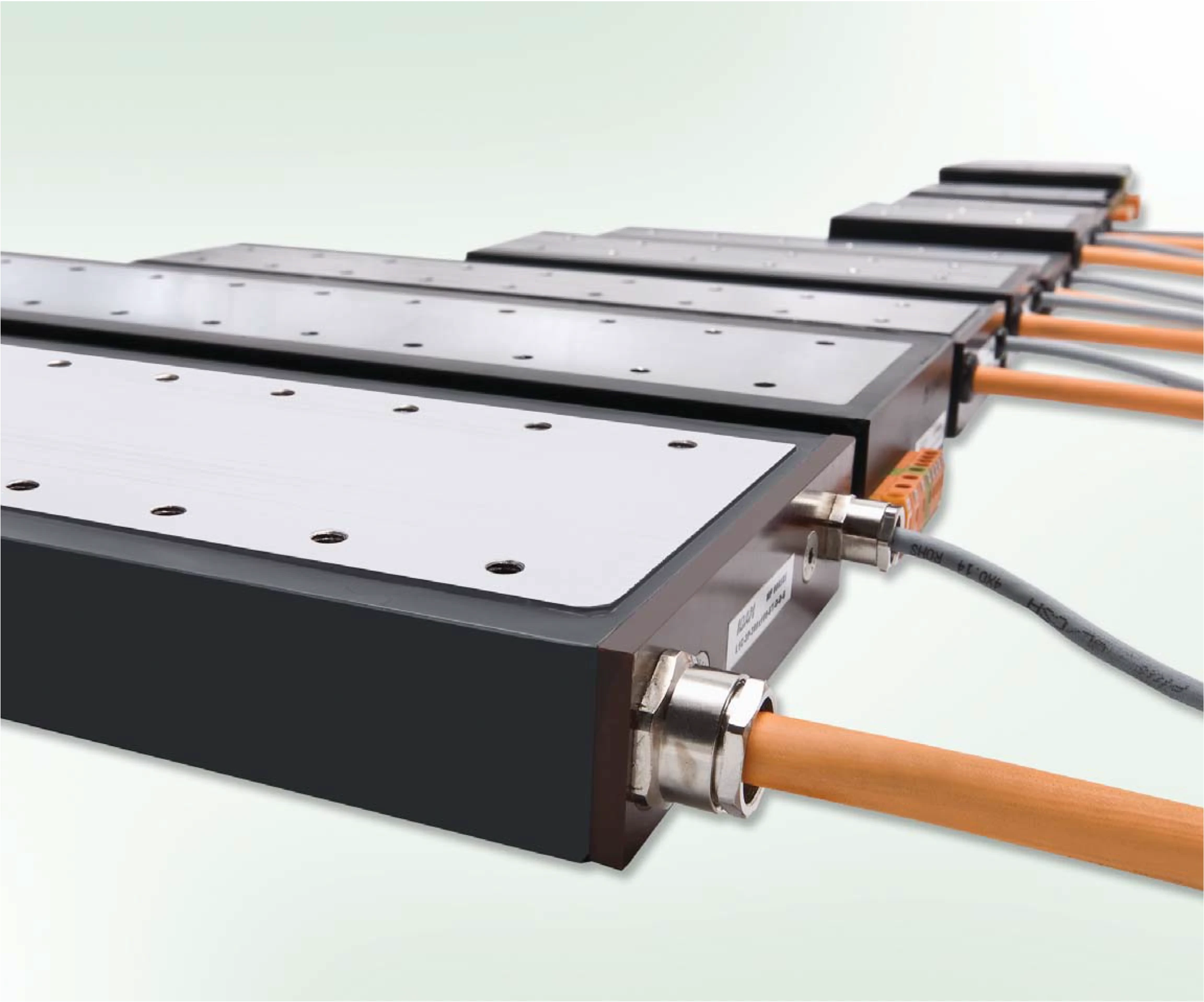
전기 연결
IDAM 모터의 표준 연결은 단면에서 인출됩니다. 모터의 케이블 인출점에서 표준 케이블 길이는 1000 mm입니다. 다른 길이는 요청 시 제공할 수 있습니다. 전력 케이블 단면적은 연속 모터 전류에 따라 달라지며 카탈로그 도면에 기재되어 있습니다. 표준으로 L1A와 L1B는 전력 손실 Pl에서의 자연 냉각 연속 전류 Ic에 따라, L1C는 전력 손실 Plcw에서의 수냉 연속 전류 Icw에 따라 치수가 결정됩니다.
모터 케이블 단면은 4G0.75 mm²부터 시작합니다. 센서 케이블 4 × 0.14 mm²(d = 5.1 mm)로 PTC 및 KTY를 통한 온도 모니터링이 가능합니다. 케이블 끝은 엔드 슬리브가 있는 개방형입니다. 사용되는 케이블은 UL 인증을 받았으며 케이블 캐리어에 적합합니다.
단자가 있는 모터 버전(WAGO Series 236 단자대, 최대 1.5 mm² 전선 단면적에 적합)은 엔드 슬리브의 대안으로 사용할 수 있습니다. 케이블 출구 또는 단자의 위치는 데이터 시트에 표시됩니다. 수냉 없이 연속 전류가 16 A를 초과하지 않는 변형의 경우 단자 사용에 제한이 없습니다.
단자 할당
모터 단자
| 심선 | 단자 번호 | 기능 |
|---|---|---|
| U | 1 | Phase U |
| VV | 2 | Phase V |
| WWW | 3 | Phase W |
| GNYE | 4 | PE(보호 접지) |
| BK | — | 실드 |
센서 단자
| 심선 | 단자 번호 | 기능 |
|---|---|---|
| WH | 7 | PTC |
| BN | 8 | PTC |
| GN | 5 | + KTY |
| YE | 6 | - KTY |
정방향 운동 방향
모든 3상 모터에서 전기적 정방향 운동은 우회전 자계에 해당하며, 즉 상전압이 U, V, W 순서로 유도됩니다. IDAM 모터에서 정방향 운동은:
- 케이블이 없는 쪽을 향한 방향 (케이블 버전)
- 단자가 없는 쪽을 향한 방향 (단자 버전)
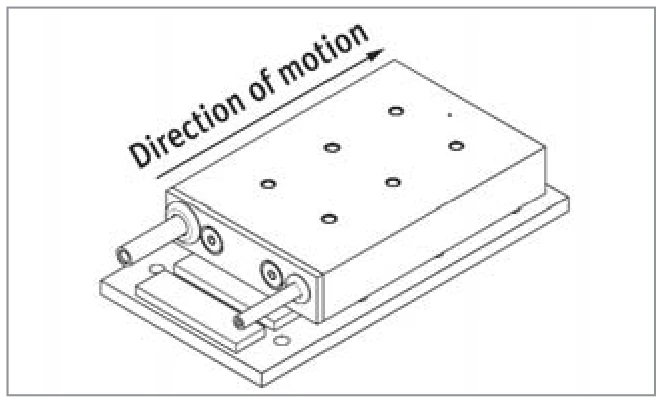
케이블 버전: 정방향은 케이블이 없는 쪽을 향함
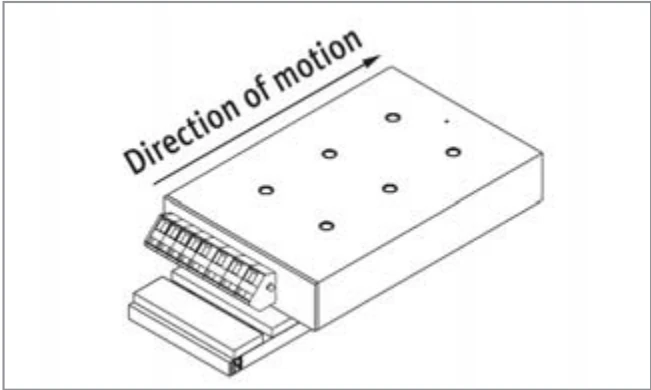
단자 버전: 정방향은 단자가 없는 쪽을 향함
모터 케이블 선정
| 연속 전류 I [A] | 케이블 단면적 [mm²] | 직경 dk [mm] | 동적 굽힘 반경 rd [mm] | 정적 굽힘 반경 rs [mm] |
|---|---|---|---|---|
| ≤9 | 0.75 | 7.3 | 73 | 44 |
| ≤16 | 1.5 | 10 | 100 | 60 |
| ≤22 | 2.5 | 11.6 | 120 | 70 |
정류
동기 모터에는 정류 운전이 선호됩니다. IDAM 리니어 모터는 표준으로 홀 센서가 장착되지 않습니다. IDAM은 정류를 위해 측정 시스템 사용을 권장합니다.
정류 방식
동기 모터는 측정 시스템(예: 리니어 엔코더)을 통해 회전자 위치를 검출하고, 이에 따라 상전류의 전환 타이밍을 제어합니다. 홀 센서의 6단계 정류에 비해, 측정 시스템 정류는 더 부드러운 사인파 전류 제어를 실현하여 힘 리플이 낮고 위치 결정 정밀도가 높습니다.
절연 저항
버스 전압 600 VDC 이하의 절연 저항
IDAM 모터는 EC 지침 73/23/EEC 및 유럽 표준 EN 50178, EN 60204를 준수합니다. 납품 전에 단계적 고전압 시험을 거치며 진공 함침됩니다.
모터의 정격 동작 전압을 반드시 준수하십시오.
인버터 운전 시 모터 단자 과전압
고속으로 전환하는 전력 반도체의 높은 du/dt 부하로 인해, 특히 긴 연결 케이블(5 m 이상)을 사용할 때 모터 단자에서 실제 인버터 전압보다 현저히 높은 전압 스파이크가 나타날 수 있습니다. 이는 모터 절연에 매우 높은 부하를 줍니다.
PWM 모듈의 du/dt 값은 8 kV/µs를 초과해서는 안 됩니다. 모터 연결 케이블은 가능한 한 짧게 유지해야 합니다.
모터를 보호하기 위해, 특정 구성에서 오실로스코프를 사용하여 PE 대비 모터 권선에 인가되는 인버터 전압(PWM)을 항상 측정하는 것이 권장됩니다. 기존 전압 스파이크가 1 kV를 현저히 초과해서는 안 됩니다. 약 2 kV부터는 점진적인 절연 손상을 예상해야 합니다.
IDAM 엔지니어가 응용 솔루션 결정 및 과도한 전압 감소를 도와드립니다.
인버터 제조업체가 제공하는 권장 사항 및 구성 지침을 준수하십시오.
냉각 및 냉각 회로
전력 손실 및 열 손실
모터 상수 km으로 정의된 전력 손실 외에도, 모터는 더 높은 제어 주파수(50 Hz 이상)에서 주파수에 따른 손실의 영향도 받습니다. 이 손실들이 합쳐져 모터와 다른 시스템 부품의 온도가 상승합니다.
낮은 제어 주파수(<80 Hz)에 대해 다음 규칙이 적용됩니다: 더 높은 모터 상수 km을 가진 모터는 더 낮은 km을 가진 비교 가능한 모터에 비해 더 낮은 전력 손실을 발생시킵니다.
운전 중 발생하는 전력 손실은 모터 어셈블리를 통해 연결된 부품으로 전달됩니다. 전체 시스템은 대류, 전도, 복사를 통해 열 분배 방식을 제어하도록 신중하게 설계됩니다.
L1C 모터의 경우, 방열 개선을 위해 냉각 시스템을 부속품으로 선택할 수 있습니다. 수냉식 모터의 연속력은 비냉각 모터의 약 두 배입니다.
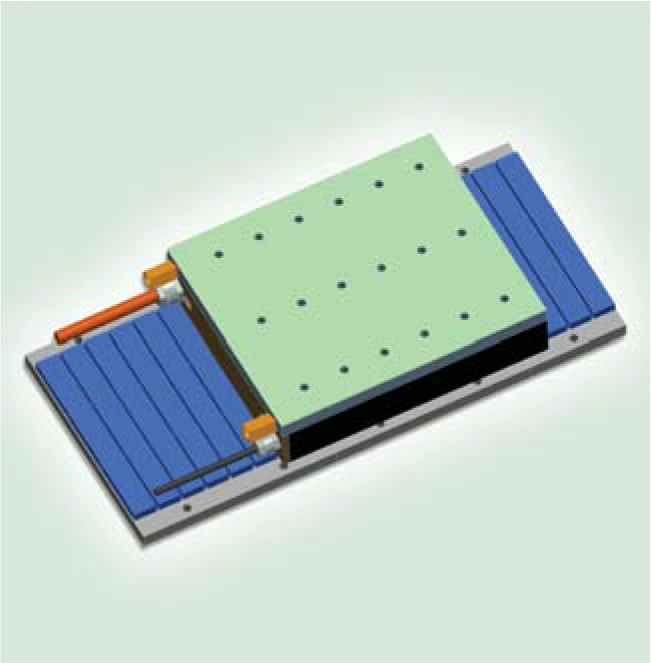
능동 냉각
능동 냉각은 고성능 및 고동적 운전 기계와 해당 고 베어링 부하 용도에 우선적으로 사용해야 합니다.
모터와 기계 사이의 완전한 열 절연이 필요한 경우(예: 고정밀 기계에서 열 변형 방지), 추가적인 단열층과 정밀 냉각이 필요합니다. 실제 냉각은 주 냉각 또는 전력 냉각 시스템입니다.
냉각판
모터 냉각 시스템은 모터와 기계 테이블 사이에 설치되는 냉각판 형태로 구현되며, 고객이 냉각 장치의 냉각 회로에 연결해야 합니다. 단열층과 냉각판은 모터 부품의 선택적 부속품으로 공급되거나 고객의 기계 설계 일부로 제공될 수 있습니다.
냉각 매체는 내부 구리관을 통해 입구에서 출구로 흐릅니다. 입출구 연결부는 두 개의 포트에 분배할 수 있으며, 연결 피팅은 G 1/8 내나사입니다.
물을 냉각제로 사용할 때는 부식 방지 및 생물 침착 방지 첨가제를 반드시 추가해야 합니다.
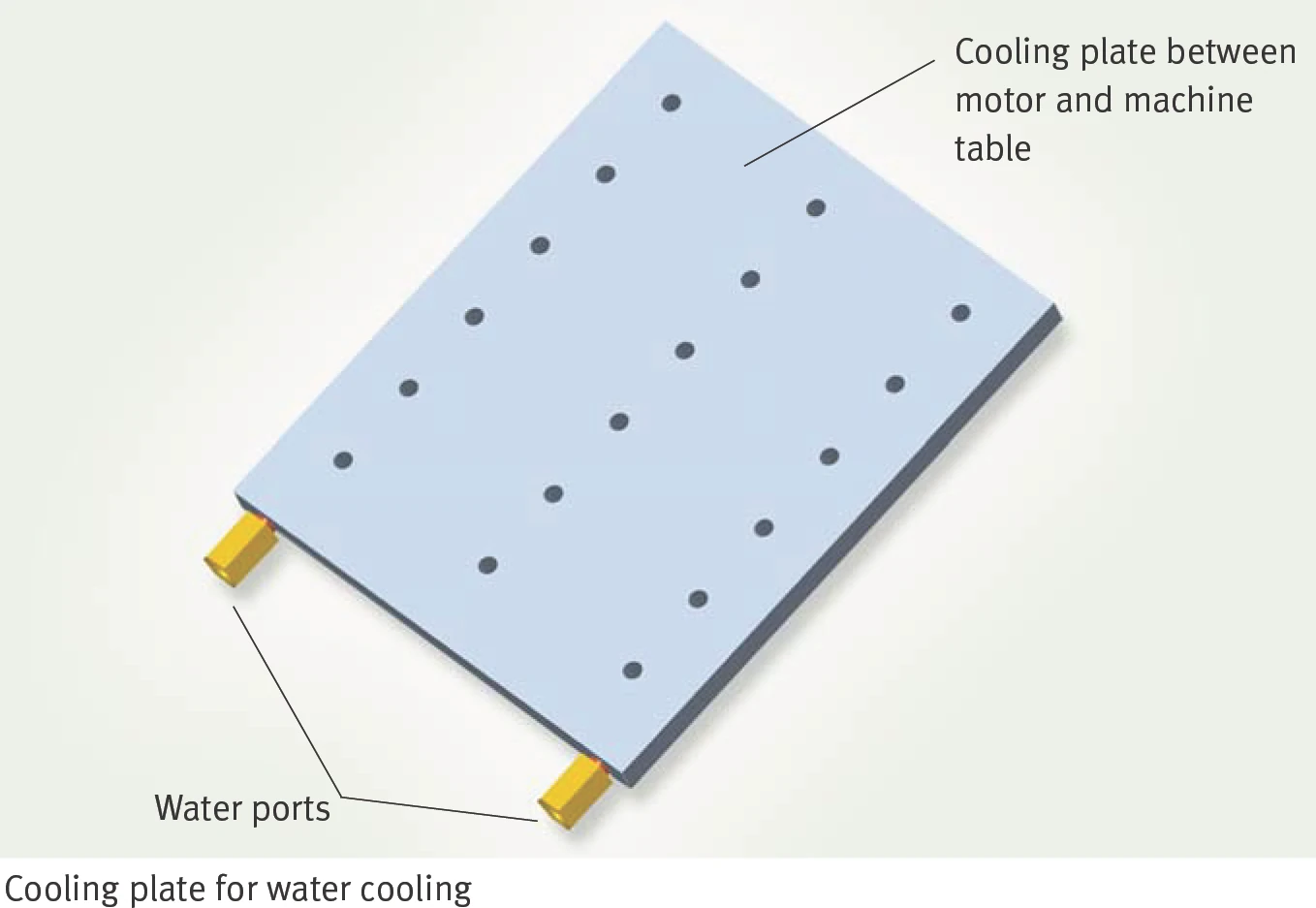
수냉용 냉각판
모터와 기계 테이블 사이에 설치된 냉각판
냉각 매체 공급 온도에 따른 특성 데이터 의존성
데이터 시트에 표시된 수냉식 연속 전류 Icw는 정격 공급 온도 θnV = 25 °C에서 달성 가능한 값입니다. 공급 온도 θV가 높을수록 냉각 성능이 저하되어 정격 전류도 감소합니다.
감소된 연속 전류 Ic red는 다음 이차 방정식으로 계산할 수 있습니다:
Ic red / Icw = √((θmax − θV) / (θmax − θnV))
- Ic red: 감소된 연속 전류 [A]
- Icw: 정격 수냉식 연속 전류 (ϑnV 기준) [A]
- θV: 현재 공급 온도 [°C]
- θnV: 정격 공급 온도 [°C]
- θmax: 최대 허용 권선 온도 [°C]
(정전류 조건에서 적용)
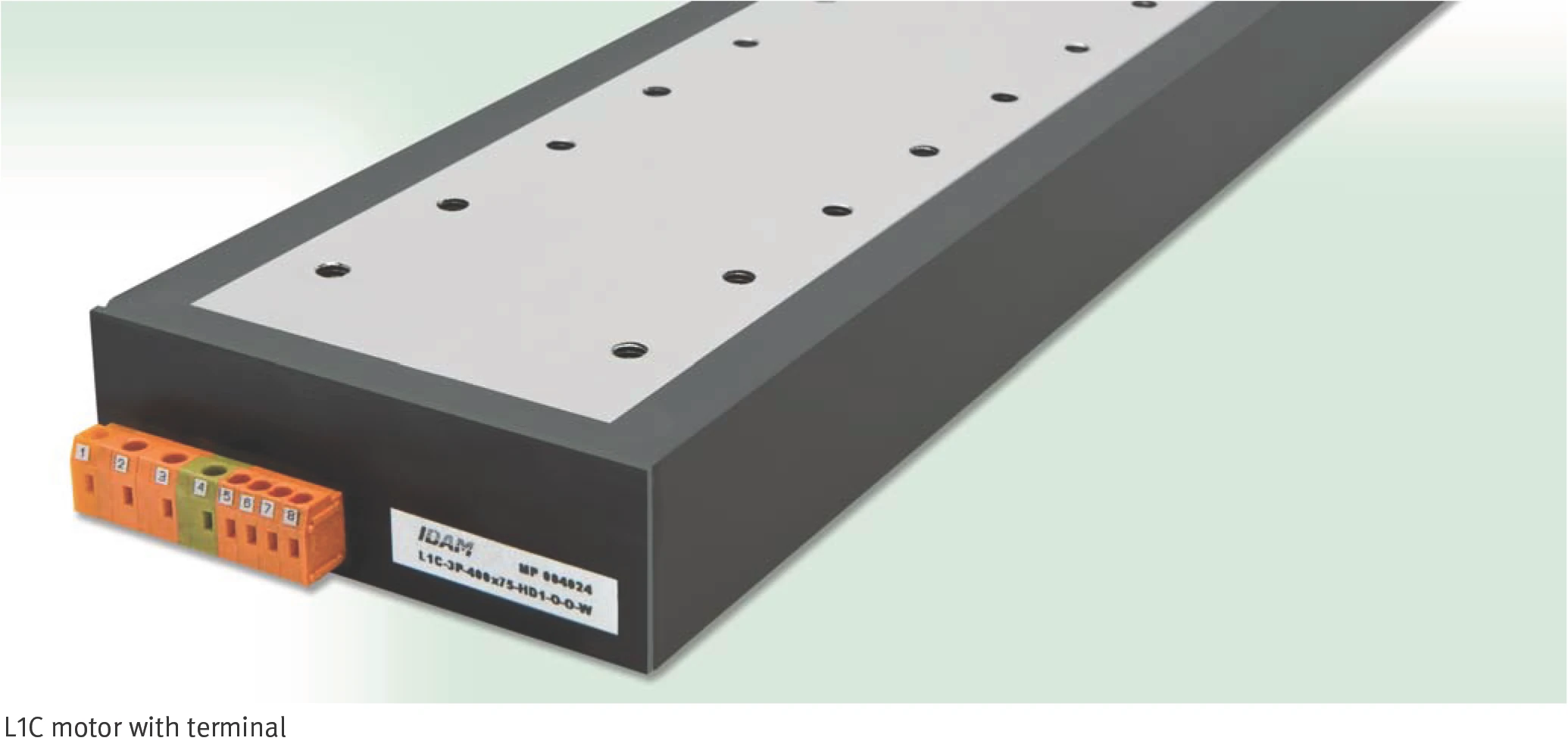
L1C 단자형 모터
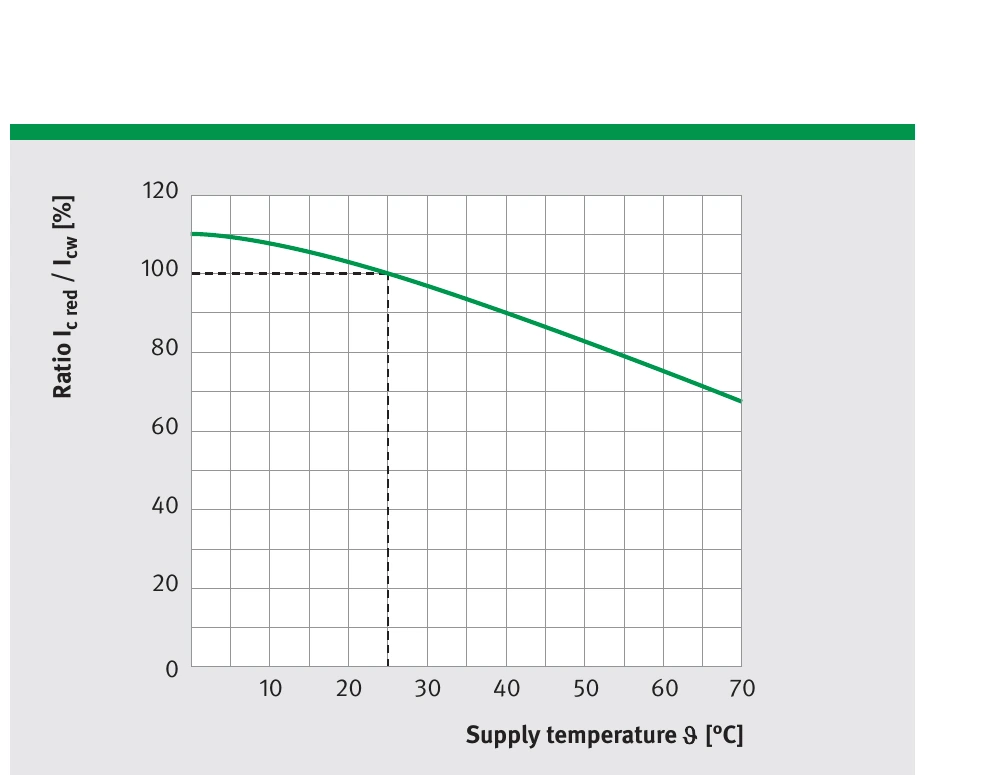
상대 연속 전류 Ic red / Icw 대 공급 온도 θV 특성 곡선 (θnV = 25 °C)
직선 운동을 위한 직접 구동 시스템 선택
주기적 응용
주기적 운전에서는 순차적인 위치 결정 운동 사이에 정지 구간이 끼어 있습니다. 단순한 위치 결정 순서는 양(+)의 가속 운동 형태를 취한 다음, 통상 동일한 크기의 감속(음의 가속도)이 이어지며, 이 경우 가속 및 감속 시간이 동일합니다. 최대 속도 vmax는 가속 단계 종료 시 달성됩니다.
v(t) 다이어그램에서 하나의 사이클이 설명됩니다 (v: 속도, t: 시간). 다이어그램은 정지 구간이 있는 전진-후진 운동을 보여줍니다 (tM: 운동 시간, tP: 무부하 정지 시간).
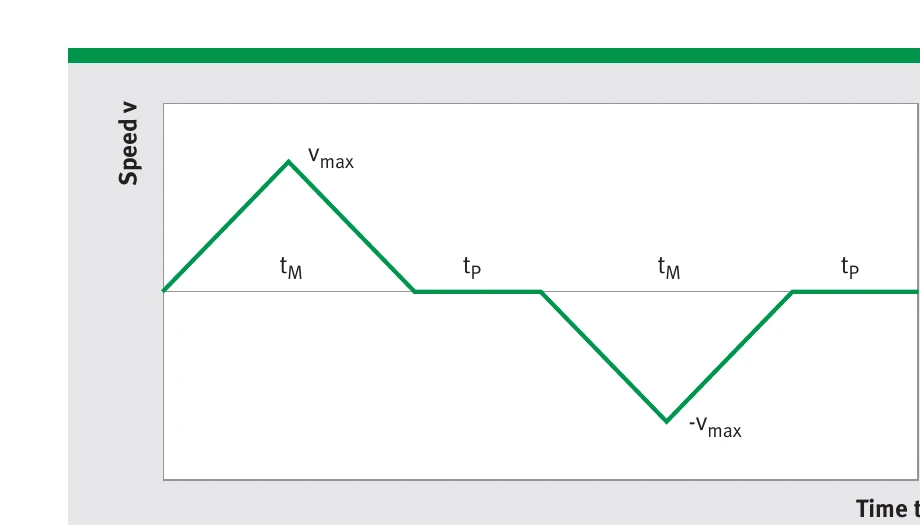
주기적 운전의 v-t 다이어그램
이로부터 a(t) 다이어그램과 운동에 필요한 힘 곡선이 도출됩니다:
F = m × a
- F: 힘 [N]
- m: 질량 [kg]
- a: 가속도 [m/s²]
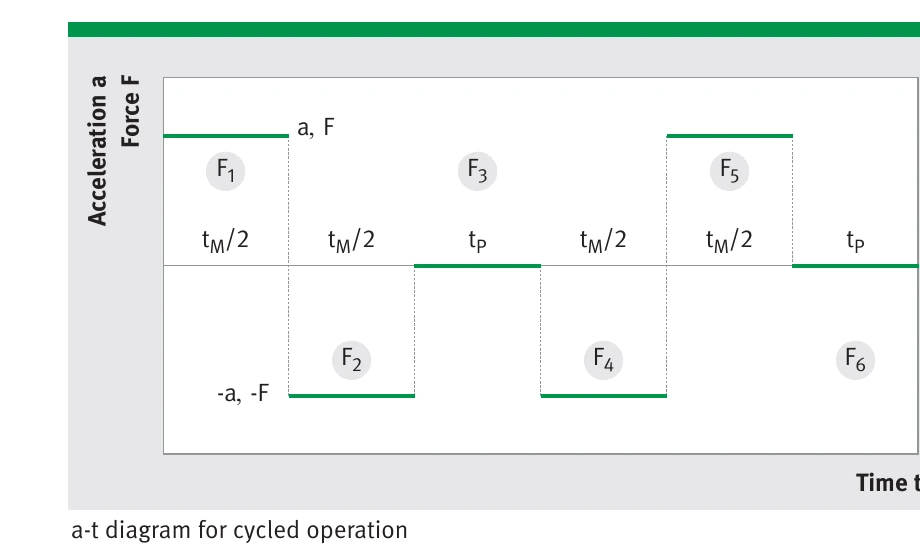
주기적 운전의 a(t) 다이어그램
세 가지 선택 기준
전동기는 원하는 사이클의 힘 곡선에 맞는 세 가지 기준에 따라 선택됩니다:
- 최대 힘: 사이클 내 최대 힘 ≤ Fp (데이터 시트 기준)
- 유효 힘: 사이클 내 유효 힘 ≤ Fc (비냉각) 또는 Fcw (수냉각) (데이터 시트 기준)
- 최대 속도: 사이클 내 최대 속도 ≤ vlp (데이터 시트 기준)
유효력 계산
유효력은 주기 내 힘 곡선의 실효값(RMS)입니다 (6개 힘 구간 예시):
Feff = √[(F1²·t1 + F2²·t2 + F3²·t3 + F4²·t4 + F5²·t5 + F6²·t6) / (t1+t2+t3+t4+t5+t6)]
각 구간의 힘과 시간(F₁=F, F₂=-F, F₃=0, F₄=-F, F₅=F, F₆=0; t₁=tM/2, t₂=tM/2, t₃=tP, t₄=tM/2, t₅=tM/2, t₆=tP)을 대입하면 다음과 같이 단순화됩니다:
Feff = F · √[tM / (tM + tP)]
이 공식은 주기 내 모든 힘의 크기가 동일한 경우(질량 및 가속도가 일정)에만 유효합니다. 분모는 사이클 시간(운동 시간 + 정지 시간)입니다.
예제 계산(19페이지)의 안전 계수 1.4는 전동기가 힘-전류 특성의 비선형 영역에서 작동하는 것도 고려합니다. 이 경우 F_eff 공식은 근사값입니다.
가속도 및 최대 속도
a = 4 · x / tM²
vmax = 2 · x / tM
- x: 총 이동 거리 [m]
- tM: 운동 시간 [s]
- a: 가속도 [m/s²]
- vmax: 최대 속도 [m/s]
위 정위 운동은 이론적으로 무한대의 저크(jerk)로 수행됩니다. 서보 드라이브에 저크 제한이 프로그래밍된 경우 위치 결정 시간이 연장됩니다. 동일한 위치 결정 시간을 유지하려면 더 큰 가속도가 필요합니다.
예제: 주기적 응용
| 사전 설정 값 | 계산 결과 | ||
|---|---|---|---|
| 총 이동 거리 | x = 0.7 m | 최대 속도 | vmax = 4.67 m/s |
| 질량 | m = 10 kg | 가속도 | a = 31.1 m/s² |
| 운동 시간 | tM = 0.3 s | 최대 힘 | Fmax = 442.4 N |
| 마찰력 | FR = 5 N | 유효력 | Feff = 216.2 N |
| 사이클 시간 | tC = 1.3 s | ||
| 안전 계수 | S = 1.4 | ||
전동기 선택 — 비냉각식
L1A-3P-200-75-WM
조건: Fmax ≤ Fp 및 Feff ≤ Fc
필요한 속도는 DC 링크 전압 600 V로 달성할 수 있습니다.
전동기 선택 — 수냉식
L1C-3P-100-75-WM
조건: Fmax ≤ Fp 및 Feff ≤ Fcw
냉각 플레이트로 인해 가속 질량이 약 500 g 증가합니다(포함됨). 필요한 속도는 DC 링크 전압 600 V로 달성할 수 있습니다.