ข้อดีของการขับเคลื่อนเชิงเส้น
Performance
- ไม่จำเป็นต้องแปลงการเคลื่อนที่
- ระบบขับเคลื่อนไม่มีความยืดหยุ่น, backlash, แรงเสียดทาน หรือ hysteresis ที่เกิดจากองค์ประกอบการส่งกำลังหรือการเชื่อมต่อ
- มอเตอร์ขนาดกะทัดรัด
- ด้วยแรงป้อนสูงเมื่อเทียบกับมวลเร่งต่ำ ทำให้สามารถบรรลุประสิทธิภาพการเร่งความเร็วที่สูงมาก ช่วงทั้งหมดตั้งแต่ความเร็วศูนย์จนถึงความเร็วสูงสุดสามารถใช้งานได้
- การวัดตำแหน่งโดยตรง
- ผ่านการวัดตำแหน่งโดยตรงและโครงสร้างเชิงกลที่แข็งแกร่ง กระบวนการกำหนดตำแหน่งมีความเป็นพลศาสตร์สูงและแม่นยำ
Operating Costs
- ไม่มีชิ้นส่วนเคลื่อนไหวเพิ่มเติม
- งานประกอบ ปรับแต่ง และการบำรุงรักษาสำหรับชิ้นส่วนขับเคลื่อนลดลงอย่างมีนัยสำคัญ
- ไม่มีการสึกหรอในระบบขับเคลื่อน
- แม้ภายใต้ภาระสลับทิศทางสูง ระบบขับเคลื่อนก็มีความทนทานสูงมาก เวลาหยุดทำงานของเครื่องจักรลดลงอย่างมีนัยสำคัญ
- ความพร้อมใช้งานสูง
- นอกจากอายุการใช้งานที่ยาวนานและการสึกหรอที่ลดลง ความแข็งแกร่งของมอเตอร์เชิงเส้นยังช่วยปรับปรุงความพร้อมใช้งานของระบบ
- การโอเวอร์โหลดทางกลในระบบขับเคลื่อนไม่ทำให้เสียหายเช่นเดียวกับมอเตอร์แบบมีเฟือง
Design
- พื้นที่ติดตั้งขนาดกะทัดรัด
- การออกแบบที่กะทัดรัดช่วยลดความต้องการพื้นที่ของโมดูลขับเคลื่อน
- ชิ้นส่วนน้อยลง
- การออกแบบที่พิสูจน์แล้วช่วยให้การผสานรวมชิ้นส่วนมอเตอร์เข้ากับแนวคิดเครื่องจักรโดยรวมเป็นไปได้ง่ายขึ้น
- ชิ้นส่วนที่น้อยลงและแข็งแกร่งขึ้นส่งผลให้อัตราความล้มเหลวต่ำ (MTBF* สูง)
- รูปแบบการออกแบบที่หลากหลาย
- ช่วยให้การผสานรวมชิ้นส่วนมอเตอร์เข้ากับแนวคิดการออกแบบเครื่องจักรโดยรวมเป็นไปอย่างเหมาะสมที่สุด
*MTBF: Mean Time Between Failures
คุณสมบัติของมอเตอร์เชิงเส้น
การขับเคลื่อนเชิงเส้นช่วยให้เกิดการเคลื่อนที่เชิงเส้นโดยไม่ต้องใช้ตัวแปลงการเคลื่อนที่หรือเฟืองกลาง
มอเตอร์เชิงเส้นประกอบด้วย primary part และ secondary part โดย primary part มีขดลวด และ secondary part ประกอบด้วยชุดแม่เหล็กถาวรที่วางอยู่ตรงข้ามกับ primary part ประเภทมอเตอร์สามารถจำแนกได้เป็น slotted, slotless และ ironless รวมถึง stepper motor (synchronous reluctance hybrid motor)
มอเตอร์ผลิตแรงที่สม่ำเสมอและเป็นลักษณะเฉพาะภายในช่วงความเร็วที่กำหนด ขนาดของแรงถูกกำหนดโดยพื้นที่ air gap ที่มีประสิทธิผลระหว่าง primary part และ secondary part
เมื่อกระแสถูกนำไปใช้กับ primary part สนามแม่เหล็กไฟฟ้ารอบขดลวดจะสร้างแรงที่กระทำต่อ secondary part ทำให้เกิดการเคลื่อนที่เชิงเส้น
ระบบแกนเชิงเส้นต้องการระบบนำทางที่เหมาะสมเพื่อรักษา air gap ระหว่าง primary part และ secondary part รวมถึงระบบวัดเชิงเส้นเพื่อตรวจจับตำแหน่งมอเตอร์
มอเตอร์แต่ละซีรีส์มีตัวเลือกความยาวและความกว้างที่แตกต่างกันเพื่อตอบสนองความต้องการแรงและการติดตั้งที่หลากหลาย และมีรูปแบบการยึดและการเชื่อมต่อหลายแบบ
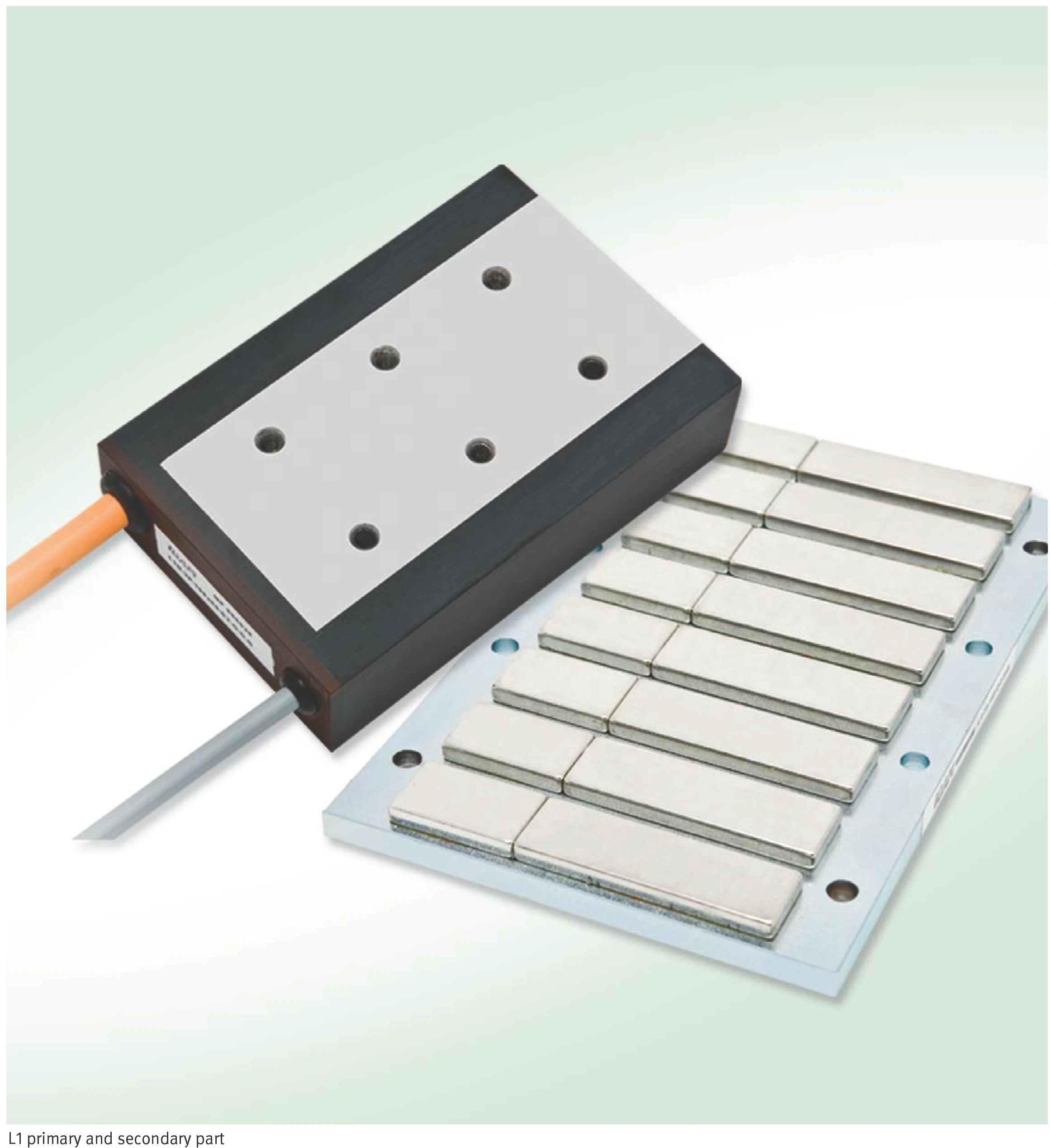
มอเตอร์เชิงเส้น L1: Primary Part และ Secondary Part
ภาพรวมซีรีส์มอเตอร์เชิงเส้น
Slotted Motors
| ประเภทมอเตอร์ | คุณสมบัติ |
|---|---|
| L1A Series | Peak force สูงถึง 1010 N | อัตราส่วนแรงต่อน้ำหนักที่โดดเด่น | เหมาะสำหรับการใช้งานระบบอัตโนมัติที่มีพื้นที่ติดตั้งแนวตั้งจำกัด |
| L1B Series | Peak force สูงถึง 1521 N | การสูญเสียความร้อนที่ได้รับการเพิ่มประสิทธิภาพ | เหมาะสำหรับการใช้งานระบบอัตโนมัติที่ต้องการแรงป้อนสูงขึ้น |
| L1C Series | Peak force สูงถึง 5171 N | การสูญเสียความร้อนที่ได้รับการเพิ่มประสิทธิภาพ | Water cooling | เหมาะสำหรับการใช้งานเครื่องมือกล |
| L2U Series | Peak force สูงถึง 12000 N | โครงสร้างแบบ Double comb | อัตราส่วนแรงต่อปริมาตรที่โดดเด่น | อายุการใช้งานยาวนาน / ประสิทธิภาพพลศาสตร์สูง | ตัวเลือกระบายความร้อน | Constant velocity | การทำให้แรงดึงดูดแม่เหล็กเป็นกลาง | เหมาะสำหรับการใช้งานเครื่องมือกล |
Low-Iron Motors / Slotless
| ประเภทมอเตอร์ | คุณสมบัติ |
|---|---|
| FSM Series | การออกแบบแบบแบน | ลด ripple force ให้น้อยที่สุด | ประสิทธิภาพพลศาสตร์สูงและความแม่นยำสูง | เหมาะสำหรับการใช้งานเครื่องวัด |
Ironless Motors
| ประเภทมอเตอร์ | คุณสมบัติ |
|---|---|
| ULIM Series | ประสิทธิภาพพลศาสตร์ที่ยอดเยี่ยม | Constant velocity | การออกแบบที่กะทัดรัด | เหมาะสำหรับการใช้งานเครื่องพิมพ์และอิเล็กทรอนิกส์ผลิตภัณฑ์ |
Reluctance Motors
| ประเภทมอเตอร์ | คุณสมบัติ |
|---|---|
| LRAM | Stepper motor | ไม่มีการสึกหรอ | Precision air bearing | เหมาะสำหรับการใช้งาน pick-and-place ในอิเล็กทรอนิกส์ผลิตภัณฑ์ | เหมาะสำหรับการใช้งานที่มีมวลน้อย |
พารามิเตอร์มอเตอร์ — เกณฑ์ประสิทธิภาพ
ตามขนาดมอเตอร์ การสูญเสียพลังงาน (copper loss) ที่เกิดจากแรงและกระบวนการที่จุดทำงานต่างๆ มีค่าคงที่และไม่ขึ้นอยู่กับการออกแบบขดลวด เนื่องจากมอเตอร์เชิงเส้นไม่ส่งออกพลังงานกลขณะหยุดนิ่ง จึงไม่มีความหมายที่จะอ้างอิงค่าสัมประสิทธิ์ประสิทธิภาพที่นี่
สูตรการสูญเสียพลังงาน
เมื่อกระแสถูกแปลงเป็นแรงยึดหรือแรงป้อน จะเกิดการสูญเสียพลังงานหรือความร้อนที่เป็นสัดส่วนกับกำลังสองของกระแสที่ไม่ขึ้นอยู่กับภาระ ความสัมพันธ์นี้ใช้ได้ในช่วงพลศาสตร์เชิงเส้นและภายใต้การทำงานแบบสถิตที่อุณหภูมิห้อง
Pl = (F / km)2
- Pl: การสูญเสียพลังงาน [W]
- F: แรง [N]
- km: Motor constant [N/√W]
Motor constant km สามารถใช้เป็นวิธีการเปรียบเทียบประสิทธิภาพของมอเตอร์ต่างๆ ค่า motor constant ที่สูงกว่าแสดงถึงการแปลงแรงเมื่อเทียบกับการสูญเสียพลังงานที่มีประสิทธิภาพมากกว่า
km เทียบกับอุณหภูมิ
Motor constant km ขึ้นอยู่กับความต้านทานโอห์มและดังนั้นยังขึ้นอยู่กับอุณหภูมิขดลวดของมอเตอร์ด้วย ในข้อมูลทางเทคนิคของมอเตอร์ km อ้างอิงที่ 25 °C
รูปด้านล่างแสดงการพึ่งพาของ motor constant อ้างอิงต่ออุณหภูมิ: ที่อุณหภูมิขดลวด 100 °C km ลดลงเหลือประมาณ 88% ของค่าที่ 25 °C
หมายเหตุความเร็วสูง
เมื่อความเร็วเพิ่มขึ้น การสูญเสียพลังงาน Pl จะถูกเสริมด้วยการสูญเสียการกลับสนามแม่เหล็กและการสูญเสีย eddy current ที่ขึ้นอยู่กับความถี่ ซึ่งไม่รวมอยู่ใน motor constant km แต่จะมีนัยสำคัญในช่วงความเร็วสูงสุดและต้องนำมาพิจารณา Motor constant km ใช้ได้เฉพาะสำหรับบริเวณเชิงเส้นของคุณสมบัติ force-current เท่านั้น
การออกแบบขดลวดและการพึ่งพา
ความเร็วสูงสุดที่บรรลุได้ของมอเตอร์เชิงเส้นใดๆ ขึ้นอยู่กับการออกแบบขดลวดและแรงดัน DC bus (UDCL) เป็นส่วนใหญ่ การลดแรงดันภายในของมอเตอร์เพิ่มขึ้นตามความเร็ว ที่ความเร็วสูงสุดที่กำหนด ความต้องการแรงดันสำหรับ field-oriented control สอดคล้องกับแรงดัน bus ของ servo converter หลังจากจุดนี้ ความเร็วจะลดลงอย่างรวดเร็ว
ยิ่งแรงดัน bus สูง ค่าคงที่แรงดันที่เกี่ยวข้องกับขดลวด (ku) ยิ่งต่ำ และความเร็วสูงสุดที่บรรลุได้ยิ่งสูง เนื่องจากความสัมพันธ์ระหว่างค่าคงที่แรงดันและค่าคงที่แรง ค่าคงที่แรงจะเพิ่มขึ้นที่ความเร็วสูงขึ้นเมื่อความต้องการกระแสสำหรับแรงเดียวกันเพิ่มขึ้น
Winding Variants
สำหรับข้อมูลขดลวด จะมีการกำหนดขดลวดมาตรฐาน WM (เหมาะสำหรับความต้องการพลศาสตร์ระดับกลาง) ไว้ล่วงหน้าสำหรับแต่ละขนาดมอเตอร์ สำหรับความต้องการพลศาสตร์ที่ต่ำกว่าหรือสูงกว่า จะมี winding variants WL และ WH ให้เพิ่มเติม
- WL: ความต้องการพลศาสตร์ต่ำ (ความเร็วสูงสุดที่แรงดัน bus ต่ำกว่าลดลงประมาณตามสัดส่วน)
- WM: ความต้องการพลศาสตร์มาตรฐาน (ขดลวดเริ่มต้น)
- WH: ความต้องการพลศาสตร์สูง
คุณสมบัติ force-current อธิบายแรงที่จุดทำงานต่างๆ คุณสมบัติ force-speed แสดงความสัมพันธ์ระหว่างแรงและความเร็วที่จุดทำงานต่างๆ
L1 Linear Motor Series
คุณสมบัติ Force-Speed
คุณสมบัติ F(v) ของ permanent magnet synchronous motor แทบไม่ขึ้นอยู่กับความเร็วในช่วงความเร็วต่ำ ซึ่งใช้ได้กับ Fp, Fcw และ Fc จนถึงความเร็วมุม vlp, vlcw และ vlc ตามลำดับ ที่ความเร็วสูงขึ้น แรงจะค่อยๆ ลดลงเนื่องจากผลกระทบของ back EMF* และลดลงเป็นศูนย์ในที่สุด
แรงดัน bus ที่สูงขึ้นจะชดเชย back EMF ที่มากขึ้น ทำให้บรรลุความเร็วที่สูงขึ้น
เงื่อนไขการทำงาน
มอเตอร์สามารถทำงานที่จุดทำงานใดๆ ด้านล่างเส้นโค้งคุณสมบัติ F(v):
- ในการทำงานต่อเนื่องแบบไม่มีการระบายความร้อน แรงสามารถสูงถึง Fc
- ในการทำงานต่อเนื่องแบบระบายความร้อนด้วยน้ำ แรงสามารถสูงถึง Fcw
- ในการทำงานแบบเป็นวัฏจักรสลับ (S3**) แรงสามารถสูงถึง Fp
สำหรับการเคลื่อนที่ของมอเตอร์แบบควบคุมวงปิด จะต้องรักษาระยะห่างที่เหมาะสมระหว่างจุดทำงานที่เป็นไปได้และบริเวณที่ลดลงของคุณสมบัติ F(v) โดยทั่วไปจะสำรองระยะห่างประมาณ 0.2 เท่าของความเร็วสูงสุดเป็น control reserve
แรงที่ v = 0 m/s
เมื่อใช้ continuous force (Fs) ขณะหยุดนิ่ง (เช่น Z-axis ที่ไม่มี mass compensation) ควรทราบว่าสามารถใช้ได้สูงสุดเพียง 70% ของแรงพิกัด การเกินค่าการลดพิกัดนี้อาจทำให้มอเตอร์โอเวอร์โหลดเฉพาะจุด
Fs = 0.7 × Fc (หรือ Fcw)
*Back EMF: Back Electromagnetic Force
**S3: โหมดการทำงานตามมาตรฐาน VDE 0530
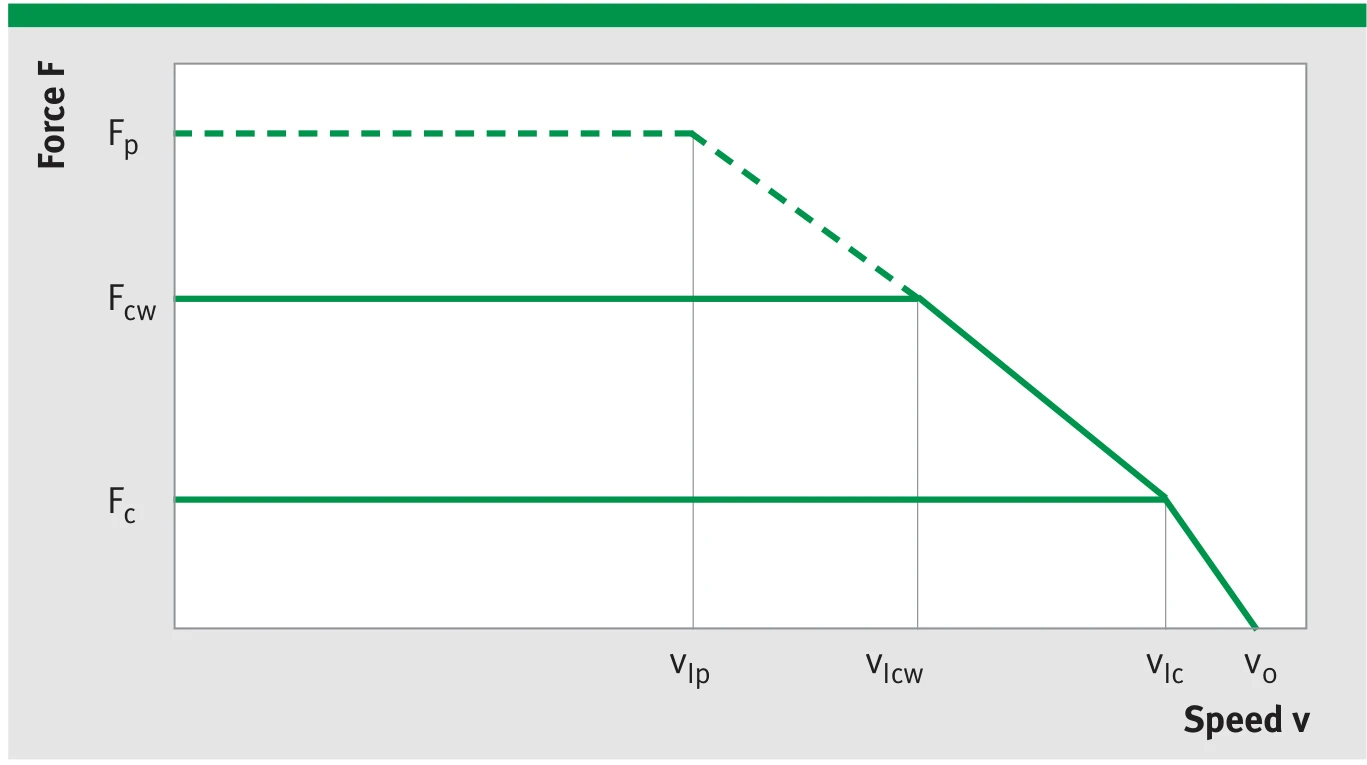
คุณสมบัติ Force-Speed (F-v): Fp (peak force), Fcw (water-cooled continuous force), Fc (uncooled continuous force) และความเร็วมุมที่สอดคล้องกัน
คุณสมบัติ Force-Current
เส้นโค้งคุณสมบัติจากจุดกำเนิด (0,0) ถึง (Fpl, Ipl) เป็นเชิงเส้นโดยประมาณ กำหนดโดย force constant kf:
F = I × kf
จุดทำงานสำหรับการทำงานแบบไม่มีการระบายความร้อน (Fc, Ic) และจุดทำงานสำหรับการทำงานแบบระบายความร้อนด้วยน้ำ (Fcw, Icw) ต่างอยู่ในบริเวณเชิงเส้นนี้
บริเวณอิ่มตัว
ที่กระแสสูง ความไม่เชิงเส้นของคุณสมบัติ force-current เกิดจากความอิ่มตัวของวงจรแม่เหล็กของมอเตอร์ ส่วนนี้ของเส้นโค้งอธิบายในแผ่นข้อมูลและไดอะแกรมโดยจุดทำงาน force-current (Fp, Ip) และ (Fu, Iu) ด้วยความชันที่ราบกว่า kf มาก
มอเตอร์สามารถทำงานที่จุดทำงาน (Fp, Ip) เป็นเวลาสั้นๆ (เป็นวัฏจักร ≤3 วินาที) โดยต้องนำการสูญเสียความร้อนเฉลี่ยมาพิจารณา สำหรับกระบวนการเร่งความเร็ว นี่คือจุดทำงานสูงสุดที่ควรใช้
จุดขีดจำกัด (Fu, Iu)
จุดขีดจำกัดต้องไม่ถูกเกินเด็ดขาด มิฉะนั้นมีความเสี่ยงที่มอเตอร์จะโอเวอร์โหลด จุดนี้ใช้สำหรับการพิจารณา short-circuit braking เท่านั้น และต้องไม่ใช้เป็นพื้นฐานการเลือก
พารามิเตอร์ทั้งหมดอธิบายไว้ในอภิธานศัพท์
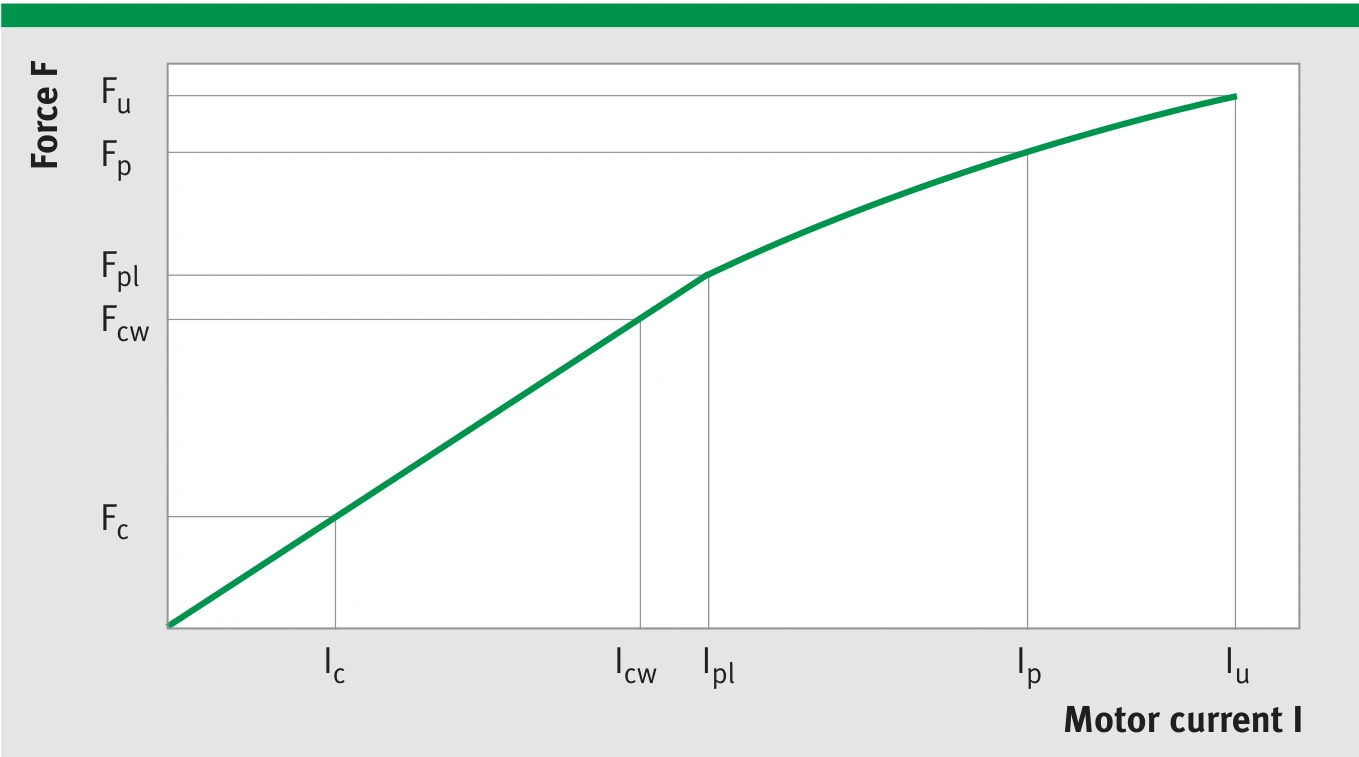
คุณสมบัติ Force-Current (F-I): บริเวณเชิงเส้น (กำหนดโดย kf) และบริเวณอิ่มตัว (จุดทำงาน Fp/Fu)
การป้องกันความร้อน
การขับเคลื่อนเชิงเส้นมักทำงานใกล้ขีดจำกัดประสิทธิภาพทางความร้อน นอกจากนี้ อาจเกิดการโอเวอร์โหลดที่ไม่คาดการณ์ระหว่างการทำงาน ทำให้กระแสเกินกว่ากระแสพิกัดที่อนุญาต ดังนั้น servo controller สำหรับมอเตอร์โดยทั่วไปควรมีการป้องกันโอเวอร์โหลดเพื่อควบคุมกระแสมอเตอร์ โดยต้องแน่ใจว่าค่า RMS ของกระแสมอเตอร์สามารถเกินกว่ากระแสพิกัดที่อนุญาตได้เพียงช่วงเวลาสั้นๆ เท่านั้น การตรวจสอบอุณหภูมิทางอ้อมนี้ทั้งรวดเร็วและเชื่อถือได้
มอเตอร์ IDAM ติดตั้งเซ็นเซอร์อุณหภูมิ (PTC และ KTY) ที่สามารถใช้สำหรับการป้องกันความร้อน
วงจรตรวจสอบ I — เซ็นเซอร์ PTC
ขดลวดเฟสทั้งสามแต่ละเส้นติดตั้ง PTC (Positive Temperature Coefficient thermistor) ต่อแบบอนุกรมเพื่อให้แน่ใจว่ามอเตอร์ได้รับการป้องกัน PTC เป็น thermistor แบบ positive temperature coefficient และหลังจากติดตั้งแล้ว ค่าคงที่เวลาทางความร้อนจะน้อยกว่า 5 วินาที
หลักการทำงานของ PTC
เมื่ออุณหภูมิตอบสนองพิกัด Tn ถูกเกิน ความต้านทานของ PTC จะเพิ่มขึ้นอย่างรวดเร็ว เพิ่มขึ้นเป็นหลายเท่าของค่าขณะเย็น เมื่อ PTC สามตัวต่อแบบอนุกรม แม้ว่าจะมีเพียงตัวเดียวที่เกิน Tn ความต้านทานโดยรวมก็แสดงการเปลี่ยนแปลงที่มีนัยสำคัญ
การใช้เซ็นเซอร์สามตัวช่วยให้มั่นใจว่าจะมีการส่งสัญญาณปิดระบบที่ปลอดภัย แม้จะมีภาระเฟสไม่สมมาตรเมื่อมอเตอร์หยุดนิ่ง
อุปกรณ์ป้องกันมอเตอร์ที่หาซื้อได้ทั่วไปต่อไว้ที่ปลายทาง โดยปกติจะทริกระหว่าง 1.5 kΩ ถึง 3.5 kΩ ด้วยวิธีนี้ สามารถตรวจจับ overtemperature ภายในช่วงไม่กี่องศาของแต่ละขดลวด
อุปกรณ์ทริปยังตอบสนองเมื่อความต้านทานวงจร PTC ต่ำเกินไป ซึ่งโดยทั่วไปบ่งชี้ว่ามีข้อบกพร่องในวงจรตรวจสอบ ซึ่งยังช่วยให้แน่ใจว่ามีการแยกไฟฟ้าระหว่าง controller และเซ็นเซอร์มอเตอร์ อุปกรณ์ป้องกันมอเตอร์ไม่ได้รวมอยู่ในขอบเขตการจัดส่ง
หลักการ: สัญญาณเซ็นเซอร์ PTC ต้องได้รับการตรวจสอบเพื่อป้องกันมอเตอร์จากความเสียหายจาก overtemperature
PTC ไม่เหมาะสำหรับการวัดอุณหภูมิ หากต้องการการวัดอุณหภูมิควรใช้เซ็นเซอร์ KTY
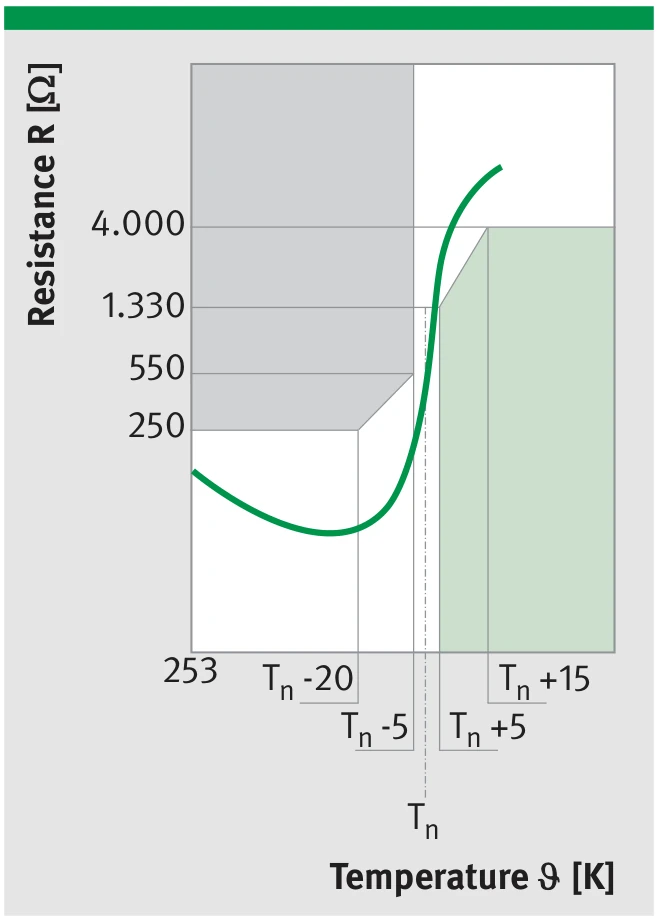
คุณสมบัติความต้านทาน-อุณหภูมิของเซ็นเซอร์ PTC: ความต้านทานเพิ่มขึ้นอย่างรวดเร็วเมื่อเกิน Tn
วงจรตรวจสอบ II — เซ็นเซอร์ KTY84-130
หนึ่งในเฟสของมอเตอร์ติดตั้งเซ็นเซอร์ KTY84-130 เพิ่มเติม ซึ่งเป็นความต้านทานเซมิคอนดักเตอร์ที่มี positive temperature coefficient ที่ให้สัญญาณเทียบเท่าอุณหภูมิ (ด้วยความล่าช้าที่ขึ้นอยู่กับประเภทมอเตอร์)
เพื่อป้องกันมอเตอร์จาก overtemperature จะมีการตั้งค่าขีดจำกัดการปิดระบบใน controller เมื่อมอเตอร์หยุดนิ่ง กระแสคงที่จะไหลผ่านขดลวด ขนาดของกระแสขึ้นอยู่กับตำแหน่งขั้วที่เกี่ยวข้อง ดังนั้น มอเตอร์จึงไม่ร้อนอย่างสม่ำเสมอ ซึ่งอาจทำให้ขดลวดที่ไม่ได้รับการตรวจสอบร้อนเกินไป
วัตถุประสงค์ของเซ็นเซอร์ KTY
เซ็นเซอร์ KTY ตรวจสอบขดลวดเดียว สัญญาณของมันสามารถใช้เพื่อสังเกตอุณหภูมิหรือออกคำเตือน ไม่อนุญาตให้ใช้ KTY เพียงอย่างเดียวเป็นพื้นฐานสำหรับการปิดระบบ
Imax = 2 mA
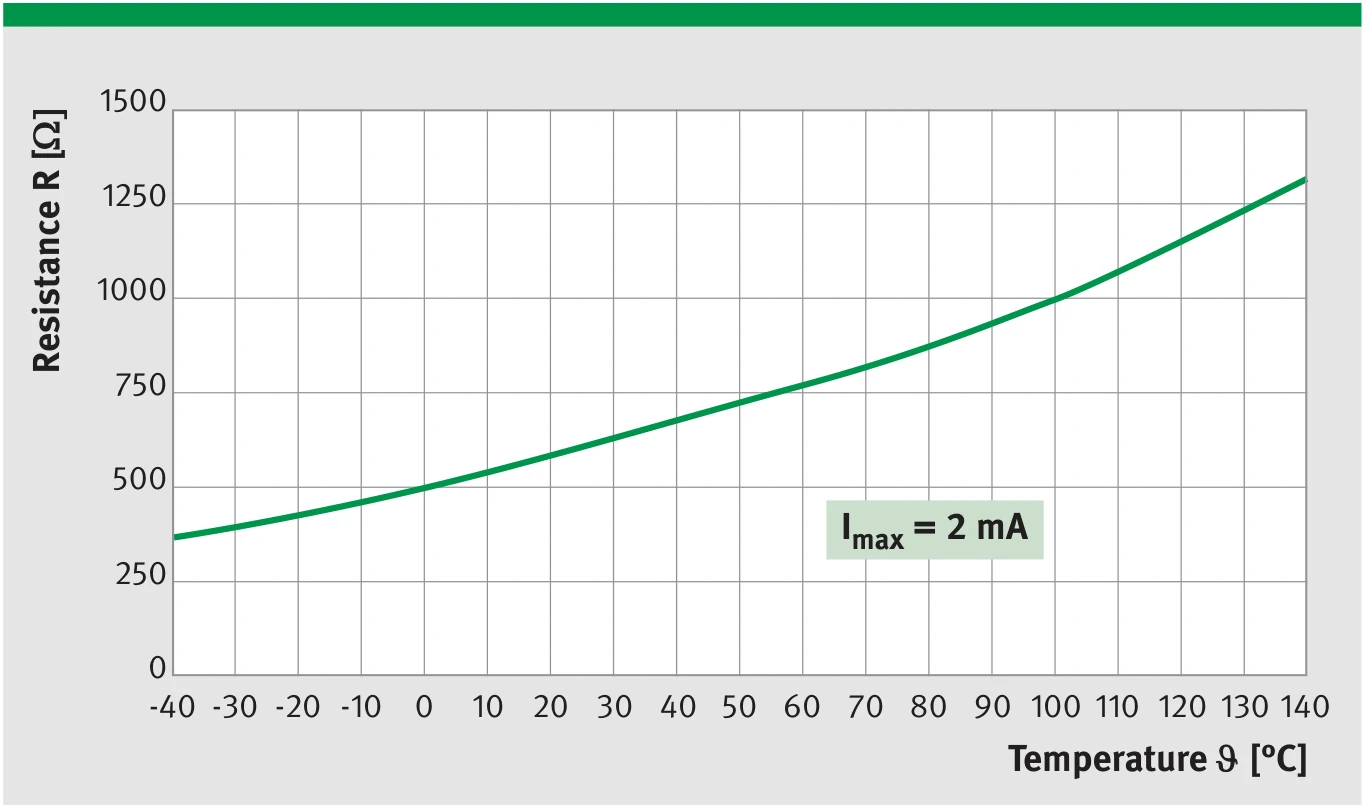
คุณสมบัติความต้านทาน-อุณหภูมิของเซ็นเซอร์ KTY84-130: positive temperature coefficient เชิงเส้นสำหรับการวัดอุณหภูมิขดลวดที่แม่นยำ
การเชื่อมต่อมาตรฐาน PTC และ KTY
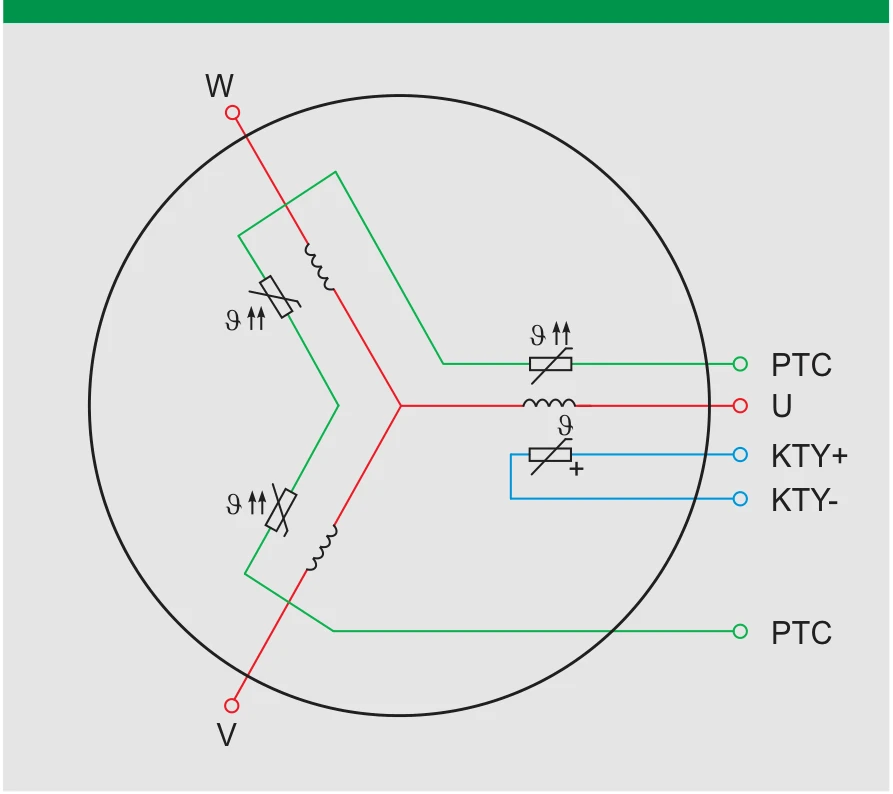
การเชื่อมต่อมาตรฐาน PTC และ KTY: เซ็นเซอร์ PTC ต่ออนุกรมในขดลวดทั้งสามเฟส เซ็นเซอร์ KTY เชื่อมต่อกับขดลวดหนึ่งเฟส
เซ็นเซอร์ PTC และ KTY มีฉนวนพื้นฐานและไม่เหมาะสำหรับการเชื่อมต่อโดยตรงกับวงจร PELV/SELV (ตามมาตรฐาน DIN EN 50178)
สามารถรวมเซ็นเซอร์ตรวจสอบเพิ่มเติมได้ตามคำขอของลูกค้า
การเชื่อมต่อไฟฟ้า
การเชื่อมต่อมาตรฐานสำหรับมอเตอร์ IDAM ออกจากหน้าปลาย ความยาวสายมาตรฐานจากจุดออกสายบนมอเตอร์คือ 1000 mm สามารถจัดหาความยาวที่แตกต่างกันตามคำขอ ขนาดภาคตัดขวางของสายไฟขึ้นอยู่กับกระแสมอเตอร์ต่อเนื่องและบันทึกไว้ในแบบวาดของแคตาล็อก ตามมาตรฐาน L1A และ L1B กำหนดขนาดสำหรับกระแสต่อเนื่องแบบระบายความร้อนธรรมชาติ Ic ที่การสูญเสียพลังงาน Pl ในขณะที่ L1C กำหนดขนาดสำหรับกระแสต่อเนื่องแบบระบายความร้อนด้วยน้ำ Icw ที่การสูญเสียพลังงาน Plcw
ขนาดภาคตัดขวางของสายมอเตอร์เริ่มต้นจาก 4G0.75 mm² สายเซ็นเซอร์ 4 × 0.14 mm² (d = 5.1 mm) ช่วยให้ตรวจสอบอุณหภูมิผ่าน PTC และ KTY ปลายสายแบบเปิดพร้อมกับปลอก สายที่ใช้ได้รับการรับรอง UL และเหมาะสำหรับ cable carrier
รุ่นมอเตอร์ที่มีขั้วต่อ (WAGO Series 236 terminal block เหมาะสำหรับขนาดสายสูงสุด 1.5 mm²) มีให้เป็นทางเลือกแทนปลอก ตำแหน่งของช่องออกสายหรือขั้วต่อระบุไว้ในแผ่นข้อมูล สำหรับรุ่นที่ไม่มีการระบายความร้อนด้วยน้ำและกระแสต่อเนื่องไม่เกิน 16 A การใช้ขั้วต่อไม่มีข้อจำกัด
การกำหนดขั้วต่อ
ขั้วต่อมอเตอร์
| Core | Terminal No. | Function |
|---|---|---|
| U | 1 | Phase U |
| VV | 2 | Phase V |
| WWW | 3 | Phase W |
| GNYE | 4 | PE (Protective Earth) |
| BK | — | Shield |
ขั้วต่อเซ็นเซอร์
| Core | Terminal No. | Function |
|---|---|---|
| WH | 7 | PTC |
| BN | 8 | PTC |
| GN | 5 | + KTY |
| YE | 6 | - KTY |
ทิศทางการเคลื่อนที่เชิงบวก
ในมอเตอร์สามเฟสทั้งหมด ทิศทางการเคลื่อนที่เชิงบวกทางไฟฟ้าสอดคล้องกับสนามแม่เหล็กหมุนตามเข็มนาฬิกา กล่าวคือ แรงดันเฟสถูกเหนี่ยวนำตามลำดับ U, V, W สำหรับมอเตอร์ IDAM ทิศทางการเคลื่อนที่เชิงบวกคือ:
- ไปทางด้านที่ไม่มีสาย (รุ่นสาย)
- ไปทางด้านที่ไม่มีขั้วต่อ (รุ่นขั้วต่อ)
รุ่นสาย: ทิศทางบวกคือไปทางด้านที่ไม่มีสาย
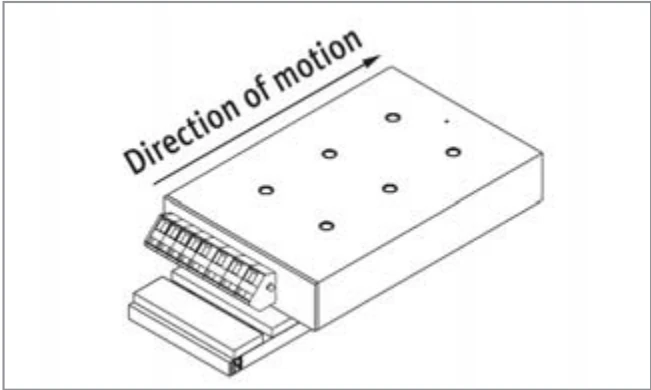
รุ่นขั้วต่อ: ทิศทางบวกคือไปทางด้านที่ไม่มีขั้วต่อ
การเลือกสายมอเตอร์
| Continuous Current I [A] | Cable Cross-Section [mm²] | Diameter dk [mm] | Dynamic Bending Radius rd [mm] | Static Bending Radius rs [mm] |
|---|---|---|---|---|
| ≤9 | 0.75 | 7.3 | 73 | 44 |
| ≤16 | 1.5 | 10 | 100 | 60 |
| ≤22 | 2.5 | 11.6 | 120 | 70 |
การ Commutation
การทำงานแบบ commutation เป็นที่นิยมสำหรับ synchronous motor มอเตอร์เชิงเส้น IDAM ไม่ได้ติดตั้ง Hall sensor เป็นมาตรฐาน IDAM แนะนำให้ใช้ระบบวัดสำหรับ commutation
วิธีการ Commutation
Synchronous motor ตรวจจับตำแหน่งโรเตอร์ผ่านระบบวัด (เช่น linear encoder) และควบคุมเวลาการสลับของกระแสเฟสตามนั้น เมื่อเปรียบเทียบกับ six-step commutation ของ Hall sensor การ commutation ด้วยระบบวัดจะให้การควบคุมกระแส sinusoidal ที่เรียบกว่า ส่งผลให้ force ripple ต่ำลงและความแม่นยำในการกำหนดตำแหน่งสูงขึ้น
ความต้านทานฉนวน
ความต้านทานฉนวนสำหรับแรงดัน Bus ไม่เกิน 600 VDC
มอเตอร์ IDAM เป็นไปตาม EC Directive 73/23/EEC และมาตรฐานยุโรป EN 50178 และ EN 60204 ผ่านการทดสอบ high-voltage แบบขั้นบันไดก่อนจัดส่ง และถูก vacuum-impregnated
โปรดตรวจสอบให้แน่ใจว่าปฏิบัติตามแรงดันทำงานพิกัดของมอเตอร์
Overvoltage ที่ขั้วต่อมอเตอร์ในการทำงานแบบ Inverter
เนื่องจากภาระ du/dt สูงที่เกิดจาก power semiconductor ที่สลับอย่างรวดเร็ว แรงดันสูงเกินพิกัดที่สูงกว่าแรงดัน inverter จริงอย่างมีนัยสำคัญอาจปรากฏที่ขั้วต่อมอเตอร์ โดยเฉพาะเมื่อใช้สายเชื่อมต่อที่ยาวกว่า (มากกว่า 5 m) สิ่งนี้ทำให้ฉนวนมอเตอร์รับภาระสูงมาก
ค่า du/dt ของโมดูล PWM ต้องไม่เกิน 8 kV/µs ควรทำให้สายเชื่อมต่อมอเตอร์สั้นที่สุดเท่าที่เป็นไปได้
เพื่อป้องกันมอเตอร์ แนะนำให้วัดแรงดัน inverter (PWM) ที่นำไปใช้กับขดลวดมอเตอร์เมื่อเทียบกับ PE โดยใช้ oscilloscope ในการกำหนดค่าเฉพาะเสมอ แรงดันสูงเกินพิกัดที่มีอยู่ไม่ควรเกิน 1 kV อย่างมีนัยสำคัญ จาก 2 kV ขึ้นไป ควรคาดหวังว่าฉนวนจะเสียหายทีละน้อย
วิศวกร IDAM จะช่วยเหลือในการกำหนดโซลูชันการใช้งานและลดแรงดันที่มากเกินไป
โปรดปฏิบัติตามคำแนะนำและคำแนะนำการกำหนดค่าที่ผู้ผลิต inverter ให้ไว้
การระบายความร้อนและวงจรระบายความร้อน
การสูญเสียพลังงานและการสูญเสียความร้อน
นอกจากการสูญเสียพลังงานที่กำหนดโดย motor constant km มอเตอร์ยังอยู่ภายใต้การสูญเสียที่ขึ้นอยู่กับความถี่ที่ความถี่ควบคุมสูงขึ้น (เกิน 50 Hz) การสูญเสียเหล่านี้รวมกันทำให้มอเตอร์และส่วนประกอบของระบบอื่นๆ ร้อนขึ้น
กฎต่อไปนี้ใช้ได้สำหรับความถี่ควบคุมต่ำ (<80 Hz): มอเตอร์ที่มี motor constant km สูงกว่าจะผลิตการสูญเสียพลังงานต่ำกว่าเมื่อเปรียบเทียบกับมอเตอร์ที่ใกล้เคียงกันที่มี km ต่ำกว่า
การสูญเสียพลังงานที่เกิดขึ้นระหว่างการทำงานจะถ่ายโอนผ่านส่วนประกอบมอเตอร์ไปยังส่วนประกอบที่เชื่อมต่อ ระบบทั้งหมดได้รับการออกแบบอย่างระมัดระวังเพื่อควบคุมการกระจายความร้อนผ่านการพาความร้อน การนำความร้อน และการแผ่รังสี
สำหรับมอเตอร์ L1C สามารถเลือกระบบระบายความร้อนเป็นอุปกรณ์เสริมเพื่อปรับปรุงการกระจายความร้อน แรงต่อเนื่องของมอเตอร์แบบ liquid-cooled ประมาณสองเท่าของมอเตอร์แบบไม่มีการระบายความร้อน
การระบายความร้อนเชิงรุก
ควรให้ความสำคัญกับการระบายความร้อนเชิงรุกสำหรับเครื่องจักรที่ทำงานที่ประสิทธิภาพสูงและสภาวะพลศาสตร์สูง รวมถึงในการใช้งานที่มีภาระ bearing สูงที่สอดคล้องกัน
หากต้องการการแยกความร้อนอย่างสมบูรณ์ระหว่างมอเตอร์และเครื่องจักร (เช่น เพื่อป้องกันการเสียรูปทางความร้อนในเครื่องจักรที่มีความแม่นยำสูง) จำเป็นต้องมีชั้นฉนวนความร้อนเพิ่มเติมและการระบายความร้อนที่แม่นยำ การระบายความร้อนจริงคือระบบระบายความร้อนหลักหรือระบบระบายความร้อนกำลัง
แผ่นระบายความร้อน
ระบบระบายความร้อนมอเตอร์ดำเนินการในรูปแบบแผ่นระบายความร้อนที่ติดตั้งระหว่างมอเตอร์และโต๊ะเครื่องจักร ซึ่งควรเชื่อมต่อโดยลูกค้ากับวงจรระบายความร้อนของอุปกรณ์ระบายความร้อน ชั้นฉนวนความร้อนและแผ่นระบายความร้อนสามารถจัดหาเป็นอุปกรณ์เสริมสำหรับส่วนประกอบมอเตอร์หรือเป็นส่วนหนึ่งของการออกแบบเครื่องจักรของลูกค้า
สื่อระบายความร้อนไหลผ่านท่อทองแดงภายในจากทางเข้าไปยังทางออก การเชื่อมต่อทางเข้าและทางออกสามารถกระจายไปยังสองพอร์ต โดยมีข้อต่อเชื่อมต่อแบบเกลียวใน G 1/8
เมื่อใช้น้ำเป็นสารระบายความร้อน ต้องเติมสารกันสนิมและป้องกันการสะสมทางชีวภาพ
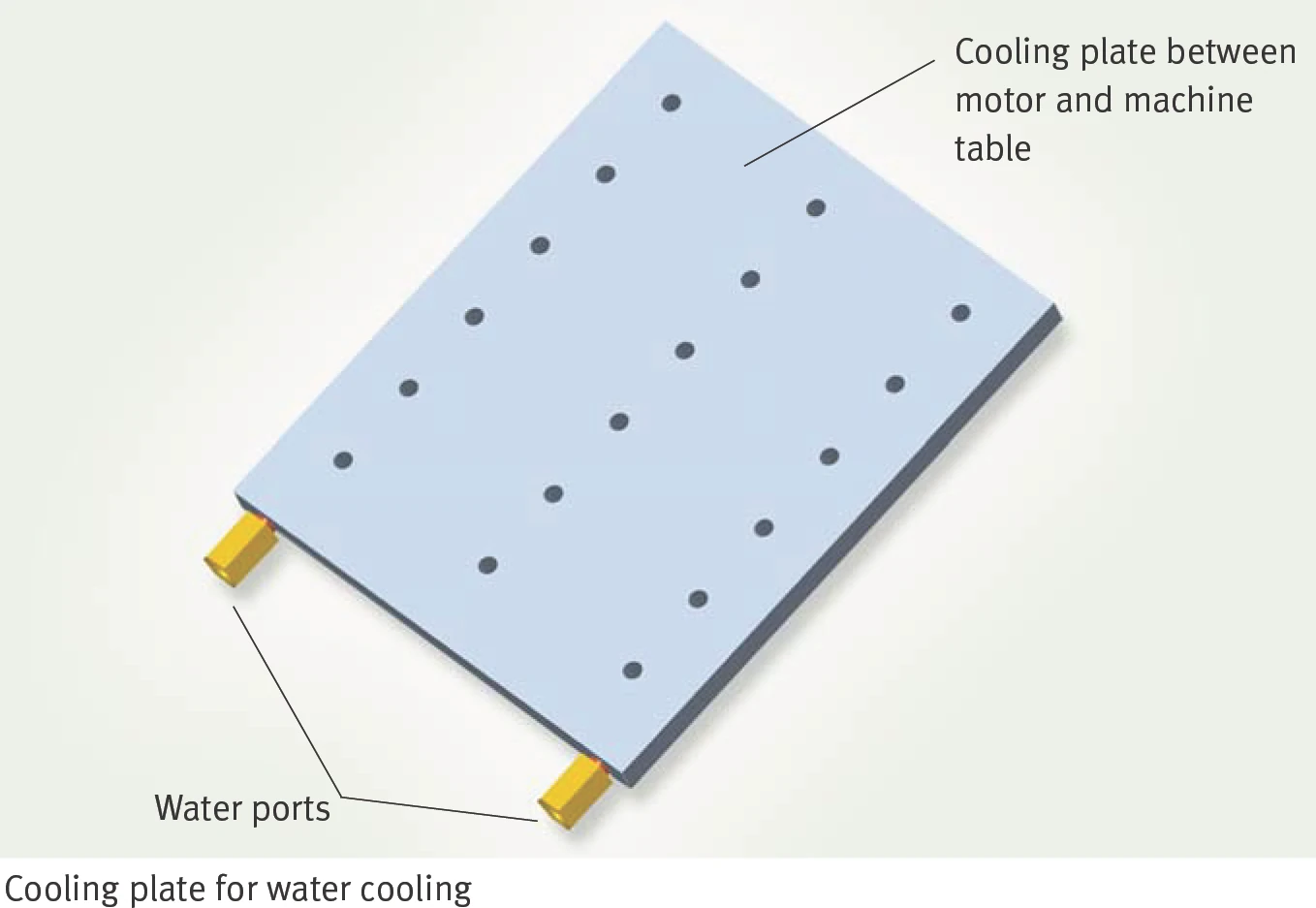
แผ่นระบายความร้อนด้วยน้ำ
แผ่นระบายความร้อนติดตั้งระหว่างมอเตอร์และโต๊ะเครื่องจักร
การพึ่งพาข้อมูลลักษณะเฉพาะต่ออุณหภูมิจ่ายสารหล่อเย็น
กระแสต่อเนื่องระบายความร้อนด้วยน้ำ Icw ที่ระบุในตารางข้อมูลสามารถทำได้ที่อุณหภูมิจ่ายที่กำหนด θnV = 25 °C อุณหภูมิจ่าย θV ที่สูงกว่าจะลดประสิทธิภาพการระบายความร้อนและกระแสต่อเนื่องที่กำหนด
กระแสต่อเนื่องที่ลดลง Ic red คำนวณได้จากสมการกำลังสองดังนี้:
Ic red / Icw = √((θmax − θV) / (θmax − θnV))
- Ic red: กระแสต่อเนื่องที่ลดลง [A]
- Icw: กระแสต่อเนื่องระบายความร้อนที่ θnV [A]
- θV: อุณหภูมิจ่ายจริง [°C]
- θnV: อุณหภูมิจ่ายที่กำหนด [°C]
- θmax: อุณหภูมิขดลวดสูงสุดที่อนุญาต [°C]
(ใช้สำหรับกระแสมอเตอร์คงที่)
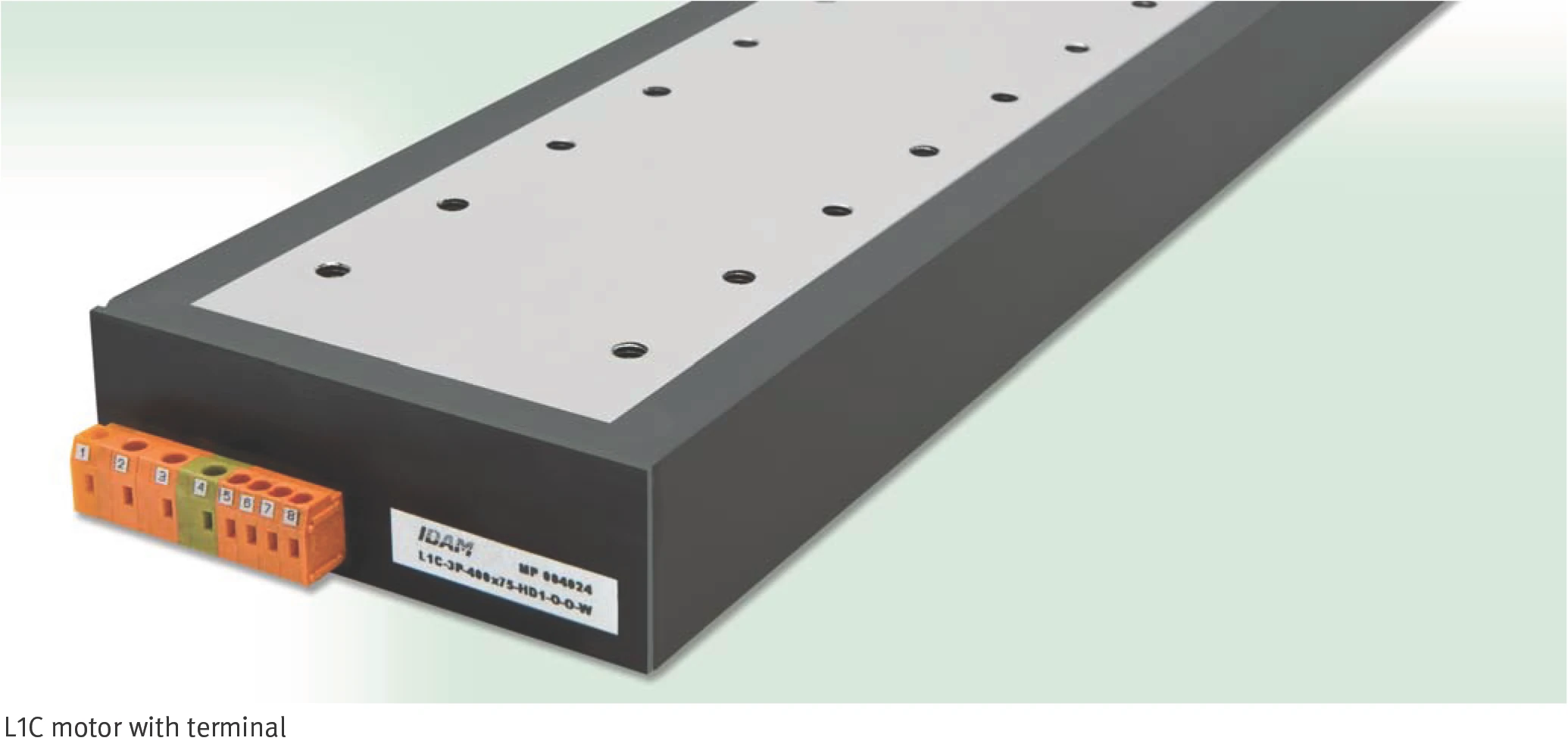
มอเตอร์ L1C แบบ terminal
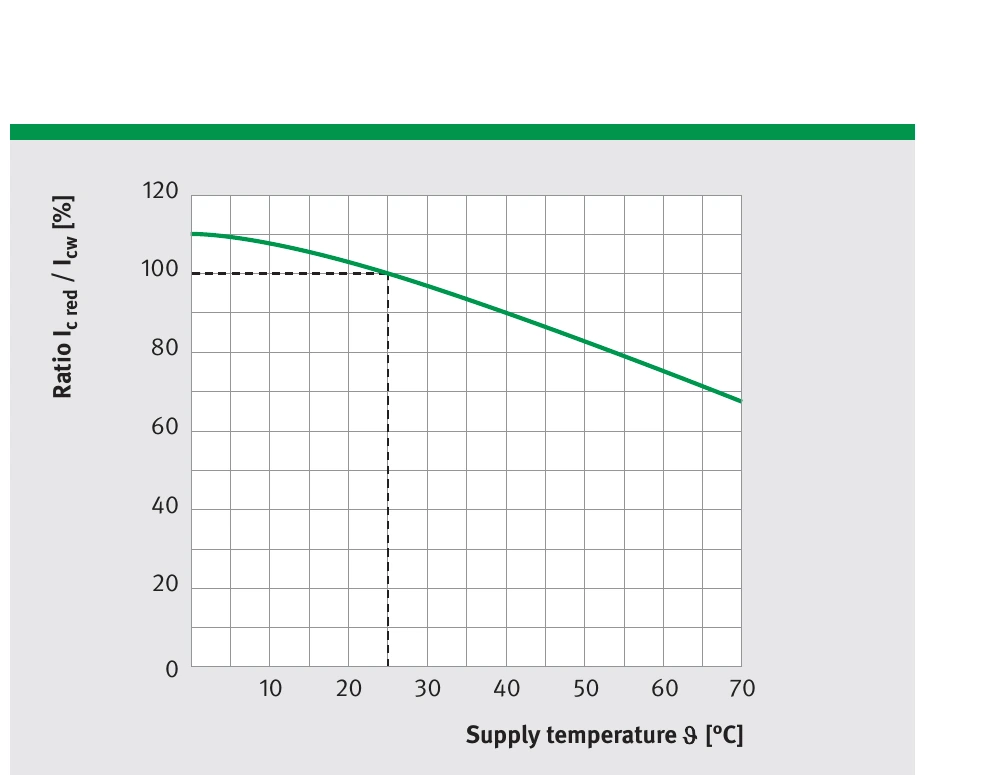
กราฟกระแสต่อเนื่องสัมพัทธ์ Ic red / Icw เทียบกับอุณหภูมิจ่าย θV (θnV = 25 °C)
การเลือก Direct Drive สำหรับการเคลื่อนที่เชิงเส้น
การใช้งานแบบวนซ้ำ
ในการทำงานแบบวัฏจักร การเคลื่อนที่กำหนดตำแหน่งต่อเนื่องสลับกับการหยุดพัก ลำดับการกำหนดตำแหน่งอย่างง่ายอยู่ในรูปแบบการเคลื่อนที่เร่งความเร็วเชิงบวกตามด้วยการลดความเร็วที่มีขนาดเท่ากันโดยทั่วไป (ความเร่งเชิงลบ) โดยมีเวลาเร่งและลดความเร็วเท่ากัน ความเร็วสูงสุด vmax ถึงที่ท้ายสุดของระยะเร่งความเร็ว
หนึ่งวัฏจักรอธิบายใน v(t) diagram (v: ความเร็ว, t: เวลา) แผนภาพแสดงการเคลื่อนที่ไปข้างหน้า-ถอยหลังพร้อมการหยุดพัก (tM: เวลาการเคลื่อนที่, tP: เวลาหยุดนิ่งแบบไม่มีภาระ)
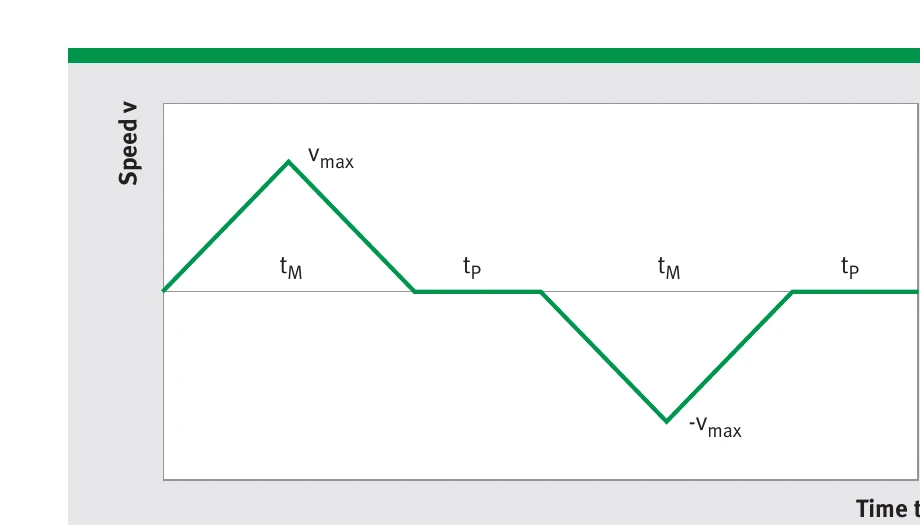
v-t diagram สำหรับการทำงานแบบวัฏจักร
จากนี้สามารถหาได้ a(t) diagram และเส้นโค้งแรงที่ต้องการสำหรับการเคลื่อนที่:
F = m × a
- F: แรง [N]
- m: มวล [kg]
- a: ความเร่ง [m/s²]
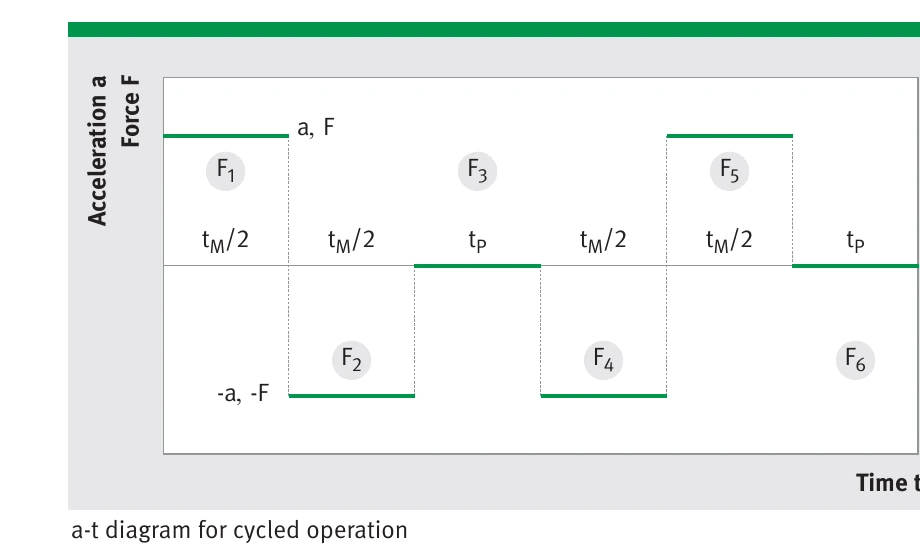
a(t) diagram สำหรับการทำงานแบบวัฏจักร
เกณฑ์การเลือกสามข้อ
มอเตอร์ถูกเลือกตามเกณฑ์สามข้อที่สอดคล้องกับเส้นโค้งแรงของวัฏจักรที่ต้องการ:
- แรงสูงสุด: แรงสูงสุดในวัฏจักร ≤ Fp ตามตารางข้อมูล
- แรงมีประสิทธิผล: แรงมีประสิทธิผลในวัฏจักร ≤ Fc (ไม่ระบายความร้อน) หรือ Fcw (ระบายความร้อนด้วยน้ำ) ตามตารางข้อมูล
- ความเร็วสูงสุด: ความเร็วสูงสุดในวัฏจักร ≤ vlp ตามตารางข้อมูล
การคำนวณแรงที่มีประสิทธิภาพ
แรงที่มีประสิทธิภาพเท่ากับค่า RMS ของเส้นโค้งแรงในรอบการทำงาน (ตัวอย่าง: หกส่วนแรง):
Feff = √[(F1²·t1 + F2²·t2 + F3²·t3 + F4²·t4 + F5²·t5 + F6²·t6) / (t1+t2+t3+t4+t5+t6)]
แทนค่าแรงและเวลาแต่ละส่วน (F₁=F, F₂=-F, F₃=0, F₄=-F, F₅=F, F₆=0; t₁=tM/2, t₂=tM/2, t₃=tP, t₄=tM/2, t₅=tM/2, t₆=tP) จะได้สมการที่เรียบง่ายขึ้น:
Feff = F · √[tM / (tM + tP)]
สูตรนี้ใช้ได้เฉพาะเมื่อแรงทั้งหมดในรอบมีขนาดเท่ากัน (มวลและความเร่งคงที่) ตัวส่วนคือเวลาต่อรอบ (เวลาเคลื่อนที่ + เวลาหยุด)
ค่าสัมประสิทธิ์ความปลอดภัย 1.4 ในตัวอย่างการคำนวณ (หน้า 19) ยังรวมถึงการทำงานของมอเตอร์ในบริเวณไม่เชิงเส้นของลักษณะแรง-กระแส ซึ่งสูตร F_eff ใช้ได้เป็นค่าประมาณ
ความเร่งและความเร็วสูงสุด
a = 4 · x / tM²
vmax = 2 · x / tM
- x: ระยะทางรวม [m]
- tM: เวลาเคลื่อนที่ [s]
- a: ความเร่ง [m/s²]
- vmax: ความเร็วสูงสุด [m/s]
การเคลื่อนที่จัดตำแหน่งนี้ดำเนินการด้วยอัตราการเปลี่ยนความเร่ง (jerk) ที่สูงอย่างไม่มีที่สิ้นสุดในทางทฤษฎี หากมีการตั้งค่าจำกัด jerk ใน servo drive เวลาจัดตำแหน่งจะยาวนานขึ้น ในกรณีนั้นต้องใช้ความเร่งสูงขึ้นเพื่อรักษาเวลาจัดตำแหน่งเดิม
ตัวอย่าง: การใช้งานแบบวนซ้ำ
| ค่าที่กำหนด | ผลการคำนวณ | ||
|---|---|---|---|
| ระยะทางรวม | x = 0.7 m | ความเร็วสูงสุด | vmax = 4.67 m/s |
| มวล | m = 10 kg | ความเร่ง | a = 31.1 m/s² |
| เวลาเคลื่อนที่ | tM = 0.3 s | แรงสูงสุด | Fmax = 442.4 N |
| แรงเสียดทาน | FR = 5 N | แรงที่มีประสิทธิภาพ | Feff = 216.2 N |
| เวลาต่อรอบ | tC = 1.3 s | ||
| ค่าสัมประสิทธิ์ความปลอดภัย | S = 1.4 | ||
การเลือกมอเตอร์ — ไม่มีระบบระบายความร้อน
L1A-3P-200-75-WM
เงื่อนไข: Fmax ≤ Fp และ Feff ≤ Fc
สามารถบรรลุความเร็วที่ต้องการด้วยแรงดัน DC link 600 V
การเลือกมอเตอร์ — ระบายความร้อนด้วยน้ำ
L1C-3P-100-75-WM
เงื่อนไข: Fmax ≤ Fp และ Feff ≤ Fcw
แผ่นระบายความร้อนเพิ่มมวลประมาณ 500 g (รวมไว้แล้ว) สามารถบรรลุความเร็วที่ต้องการด้วยแรงดัน DC link 600 V