3.1.1 量測系統分類
不同類型的量測原理
工業應用中的線性距離量測使用了多種高精度距離量測系統。 根據物理量測原理的不同,可將這些系統分為不同的類別。
磁阻式系統
使用 MR 感測器或霍爾效應感測器記錄標尺磁化的週期性變化。 與光學系統不同,磁性系統不受污垢影響。 典型的柵距週期在 0.4 至 10 mm 之間。
光學式系統
使用感測器掃描柵距,記錄反射/透射光亮度或相位的週期性變化。 可實現週期小於 10 µm 的極細柵距, 提供最高的解析度。
電感式系統
採用機械結構化的金屬標尺,設計極為堅固。 這些條帶像變壓器鐵芯一樣工作。 難以實現低於 1mm 的柵距週期。
直接量測與間接量測
驅動元件與量測系統元件如何協同工作至關重要。 根據作用原理的不同,我們區分間接量測和直接量測。
間接量測

Linear guideway without integral positioning measurement system
無整合式定位量測系統的線性導軌
元件:
- 線性位移轉換為其他量測值
- 範例:滾珠螺桿配旋轉編碼器
- 優點:成本低且結構緊湊
- 缺點:轉換過程會引入誤差
直接量測(MONORAIL AMS)
Linear guideway with integral positioning measurement system (MONORAIL AMS)
帶整合式定位量測系統的線性導軌(MONORAIL AMS)
元件:
- 量測系統整合於線性導軌中
- 讀數更準確
- 較少受環境因素影響
- 推薦用於精密應用
3.1.2 距離量測原理概覽
| 距離量測原理 | 光學式 | 磁阻式 | 電感式 |
|---|---|---|---|
| 解析度 (Resolution) | ● ● ● | ● ● ● | ● |
| 易於整合 (Ease of integration) | ● | ● ● ● | ● ● ● |
| 抗污性 (Sensitivity to dirt) | ● | ● ● | ● ● ● |
| 安裝空間 (Installation space) | ● | ● ● ● | ● ● ● |
| 安裝 (Installation) | ● ● | ● ● ● | ● ● ● |
● = 尚可 (Satisfactory), ● ● ● = 非常好 (Very good)
3.1.3 磁阻式量測技術
磁阻效應
所有磁阻效應都基於鐵磁性薄層因外部磁場而改變其歐姆電阻的事實。 SCHNEEBERGER 距離量測系統中的感測器使用各向異性磁阻效應(AMR 效應)。
三種已知效應
- AMR(各向異性磁阻)- SCHNEEBERGER 採用
- GMR(巨磁阻)
- TMR(穿隧磁阻)
SCHNEEBERGER 距離量測系統中的感測器使用各向異性磁阻效應(AMR 效應), 該效應由 Thomson 於 1857 年在鐵磁材料中發現。 當導體中的電流方向與磁化方向平行時,其電阻會比電流方向與磁化方向垂直時增加幾個百分點。
利用鐵磁材料薄層,可以通過外部磁場定向其內部磁場來製造磁場感測器。 外部磁場移除後,內部磁場會保持定向。這是鐵磁材料的基本特性。

Weiss domains orientation
魏斯磁域定向
魏斯磁域定向
Magnetic regions (Weiss domains) are oriented on the external magnetic field.
磁性區域(魏斯磁域)根據外部磁場定向。
物理現象:
- 外部磁場 H⃗r 作用於材料
- 磁域自發定向排列
- 磁化方向影響電阻值
- 形成磁阻效應的物理基礎
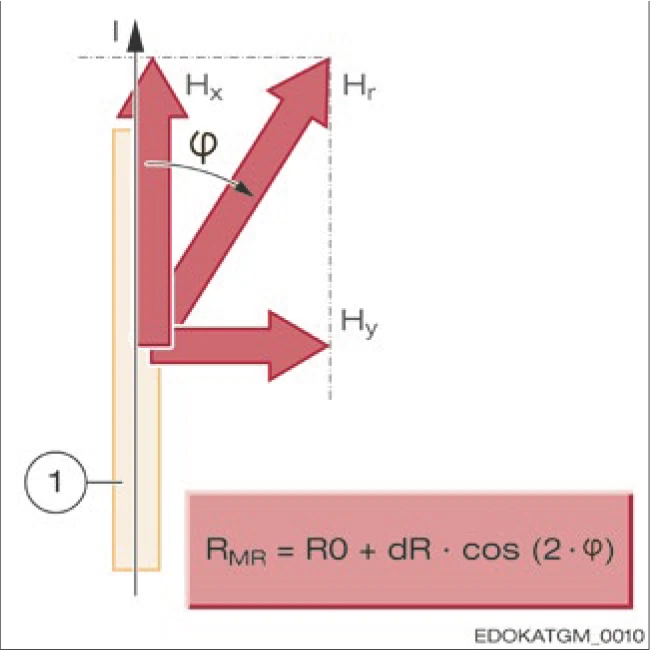
Principle of magneto-resistive sensor with MR strips
採用 MR 條帶的磁阻感測器原理
MR 條帶電阻變化原理
(Intrinsic magnetization of the strip, mainly due to form anisotropy)
(Angle between magnetization and direction of current flow)
電阻公式:RMR = R0 + dR · cos(2·φ)
MR 條帶特性
磁阻式增量感測器
由於單個 MR 條帶的電阻會受到溫度變化和磁干擾場的影響,通常使用四個條帶作為感測器, 配置為惠斯登電橋。其特點是所有四個電阻的相同變化(例如由於溫度上升)不會在輸出端產生電壓差。 為了實現可量測的效果,電阻必須適當地偏轉,例如電阻 1 增加、2 減少、3 增加、4 減少。 這可以通過在週期性磁化中適當定位 MR 條帶來實現。
由此可知,每個感測器都適配於其磁化的刻度週期,並且只能與該週期配合使用。 此外,MR 條帶不是單獨設計的,而是多個條帶的串聯開關,每個條帶彼此相距一個磁週期。 我們稱之為等效位置。這樣可以獲得標尺在磁化強度和極長度方面的平均變化。
基於感測器的二次特性曲線(量測磁場強度值),可以獲得磁刻度週期長度一半的初始訊號。 MONORAIL AMS 感測器的磁刻度為 400 µm,因此電訊號週期為 200 µm。
最後,將兩個相同的結構偏移 1/4 訊號週期(50 µm),從而獲得正弦和餘弦訊號, 藉此可以量測運動方向和行程距離。
完整的示意性感測器結構如下所示:

Schematic structure of sine and cosine sensors
正弦和餘弦感測器的示意結構
元件說明:
物理配置:
由於兩個訊號來自量測標尺上的相同位置,因此這種感測器對橫向和旋轉位移非常不敏感。 在實務上,這導致週期性量測變化具有穩定的特性。 標尺的場強度在 y 方向上從標尺變化。 這導致磁場在距離標尺很遠的地方相互抵消。 在近距離範圍內,距離約為一個週期長度,但磁場強度隨著 y 方向的距離呈指數下降。
磁性標尺
SCHNEEBERGER 製造整合量測標尺的成型軌導軌。磁場週期性變化 (N-S-N-S-N-S...)的磁性標尺可與 MR 感測器配合實現增量距離量測。

Construction of magnetic scale in profile rail
成型軌導軌中磁性標尺的構造
磁性標尺結構:
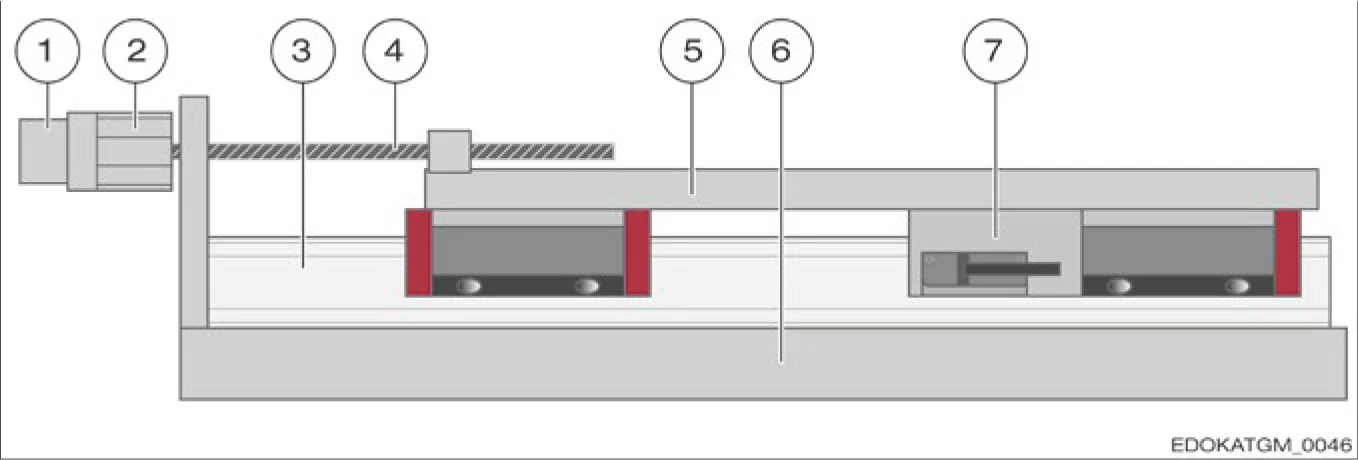
系統元件
完整功能的 AMS 系統包含:

Complete AMS measuring system components
完整的 AMS 量測系統元件
- 導軌,整合量測標尺
- 配件,用於安裝和連接
- 量測滑座,作為完整單元
- 螺絲,用於讀頭安裝
- 讀頭,包含感測器和電子元件
量測滑座由一個 MONORAIL 滑座組成,其一側安裝了外殼。 外殼包含帶有支撐表面的切口,用於安裝讀頭。 讀頭用螺絲固定在外殼上,因此易於更換。
接觸式採樣
為了正確處理增量訊號,需要在感測器和量測標尺之間保持一致的工作距離。 由於這個小公差無法通過剛性調整結構實現,因此 AMS 距離量測系統採用接觸滑動量測原理。
MR 感測器封裝在滑靴外殼中,通過葉片彈簧保持水平位置, 並由壓縮彈簧壓在量測標尺上。滑靴外殼具有研磨的滑動表面, 通過這些表面設定並保持感測器與量測標尺之間的恆定工作距離。

Contact sampling assembly for AMS distance measuring systems
AMS 距離量測系統的接觸式採樣組件
元件說明:
滑靴也形成刮片邊緣,較大的顆粒和液體無法通過。 此外,上述外殼的刮片必須完好無損,以確保接觸式採樣的有效運行條件。
這種結構確保所有易損零件和特定電子元件都在讀頭中。 由於側面安裝,讀頭可以非常容易地更換。 小的製造公差確保讀頭可以在現場輕鬆更換,而帶有標尺的導軌保持不動。
3.1.4 距離量測系統
內插
對於距離量測應用,內插是指將類比輸入訊號轉換為具有較小訊號週期的數位輸出訊號。 這是必要的,因為無法直接從類比訊號產生計數器讀數和/或位置讀數。
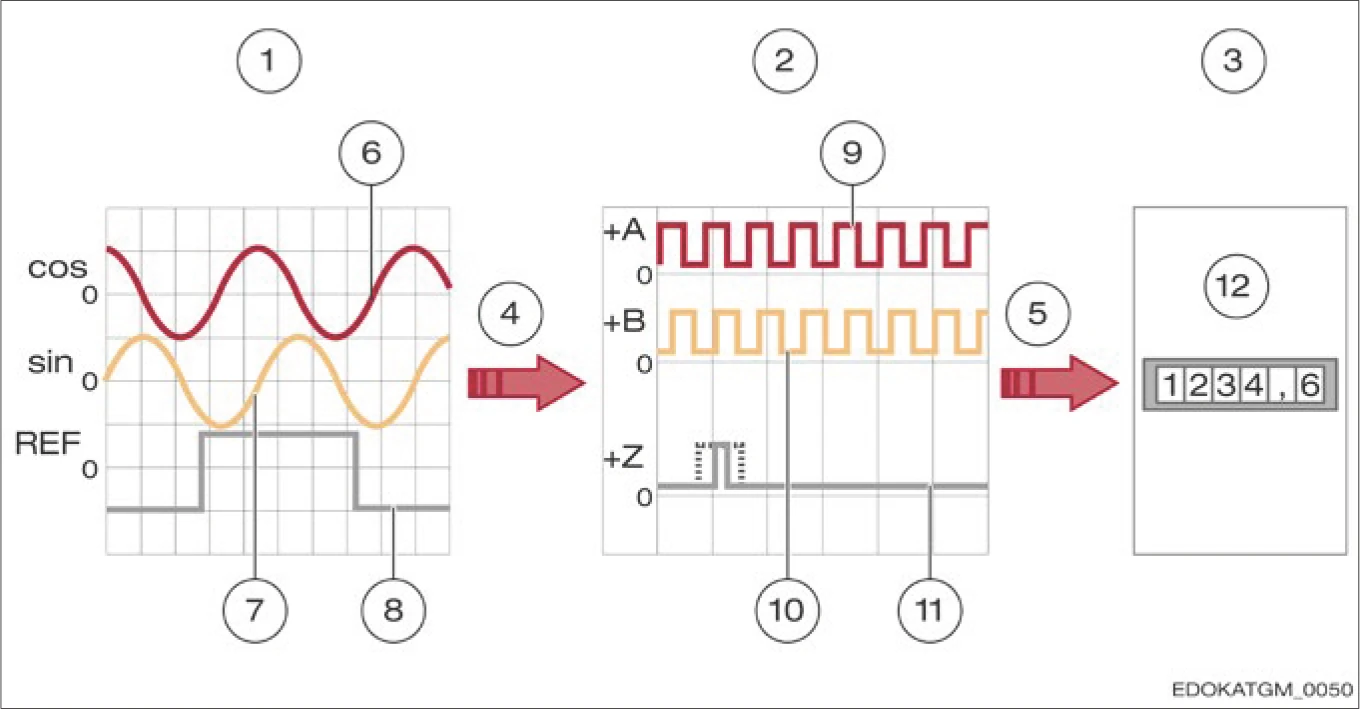
The analogue input signals (sin, cos, Ref) are interpolated (red arrow) with the digital output signals (+A, +B, +Z). Inverted signals are not represented.
類比輸入訊號(sin、cos、Ref)通過內插(紅色箭頭)產生數位輸出訊號(+A、+B、+Z)。反相訊號在此圖中未顯示。
Analogue input signal: sin, cos, REF
Analogue input signal (sin)
Digital output signal: +A, +B, +Z
Analogue input signal (REF)
Downstream electronics
Digital output signal (+A)
Interpolation
Digital output signal (+B)
Signal transmission
Digital output signal (+Z)
Analogue input signal (cos)
Measuring counter, PC, controller for machine etc.
為此,內插倍率定義了類比輸入訊號與數位輸出訊號的訊號週期比率。
訊號傳輸與評估
Signal transmission and evaluation
數位訊號由兩個增量訊號 +A 和 +B 以及參考訊號 +R 組成,傳輸至下游電子元件。 這可以是簡單的量測計數器、PC 或機器控制器。 下游電子元件通過計數訊號邊緣從數位訊號中確定位置值。 計數方向由相關通道的電平決定。根據評估多少個邊緣,我們稱之為:
單邊緣評估
僅計數一個通道的一個邊緣。一個量測步進 = 一個數位訊號週期。
雙邊緣評估
計數一個通道的上升和下降邊緣。一個量測步進 = 半個訊號週期。
四邊緣評估
計數兩個通道的所有邊緣。一個量測步進 = 四分之一訊號週期(最高解析度)。

Comparison of edge evaluation methods
邊緣評估方法比較
振幅控制(AGC - 自動增益控制)
振幅控制是指 SCHNEEBERGER AMS 評估電子元件調整輸出振幅至特定值的功能。 在 AMS 系統中,正弦和餘弦訊號的瞬時值會被數位化,並據此計算振幅。 計算值會與標稱值進行比較,並相應調整 MR 感測器的橋接電壓 Ub。 結果會獲得穩定的電壓輸出值。調整後會產生新的更佳瞬時值。
MONORAIL AMS 規格
- 控制時間:2 kHz 至 10 kHz 之間
- 自動調整橋接電壓以維持穩定輸出
- 持續優化訊號品質
電源感測功能(Power Sense Function)
所有 AMS 產品都配備電源感測線(參見引腳佈局供電電壓反饋), 用於補償長電源供應線路中的電壓降。 如果所使用的控制器支援此功能,我們建議使用它以保證讀頭的功能可信賴性。
主要特點
- 所有 AMS 產品均整合電源感測線
- 補償長電源線路的電壓降
- 提高讀頭的功能可信賴性
- 選配功能(需要控制器支援)
精度等級(Accuracy Class)
精度等級指定了系統在規定操作條件下的最大預期量測偏差。 精度等級為 5 µm 的距離量測系統允許 ±5 µm 的偏差。 為了便於比較,精度等級是以 1 公尺的參考長度為基準來規定的。
關鍵概念
- 定義:最大預期量測偏差
- 條件:在規定的環境條件下運作
- 範例:5 µm 精度等級 = ±5 µm 偏差
- 參考長度:1 公尺(用於規格制定)
解析度(Resolution)
解析度描述量測系統中可能量測到的最小位置變化。 它由類比訊號週期、內插倍率和評估程序(積分時間或取樣率)決定。 例如,在內插倍率設定為 100 且輸入訊號週期為 200 µm 的情況下, 輸出訊號週期為 2 µm,根據控制器中的四邊緣評估,解析度為 0.5 µm。
解析度計算
- 取決於:類比訊號週期 × 內插倍率 × 評估方法
- 範例:200 µm 訊號 × 100 內插 = 2 µm 輸出訊號
- 四邊緣評估:2 µm ÷ 4 = 0.5 µm 解析度
取樣率(Sampling Rate)
取樣率描述每個時間間隔內對類比訊號進行取樣的頻率。 通常時間間隔為一秒,因此取樣率的單位為 Hz。 根據奈奎斯特-夏農定理(Nyquist-Shannon Theorem), 取樣頻率應至少是原始訊號頻率的兩倍,以保證能夠近似完整地重現原始訊號。
關鍵原理
- 定義為:每個時間間隔的頻率
- 標準單位:Hz(每秒樣本數)
- 奈奎斯特-夏農定理:取樣頻率 ≥ 2 × 訊號頻率
- 確保:準確的訊號重現
反轉誤差/遲滯(Reversal Error/Hysteresis)
如果使用適當的測試設定在每種情況下交替進行相反方向的重複定位精度量測, 則可以發現距離量測系統在從右側接近和從左側接近之間的平均位置差異。 這種差異稱為反轉誤差或遲滯。SCHNEEBERGER 在其技術資料表中規定了此值。 單向重複定位精度通常明顯低於規定的遲滯值。
重複定位精度(Repeatability)
量測系統的單向重複定位精度通常被理解為特定系統在完全相同的環境條件下重複結果的能力。 在這種評估中,必須知道量測誤差並將其納入分析。 工具機的重複定位精度可以使用簡單的方法針對特定位置和特定行進方向進行測定。 在評估重複定位精度時,會完成許多量測,並計算算術平均值和標準偏差。

Hysteresis and repeatability measurement diagram
遲滯與重複定位精度量測示意圖
量測示意圖:
參考點定位(Referencing)
增量式量測系統(例如 AMS-3B 和 AMS-4B)在開機後無法確定絕對位置, 因此在增量軌道上增加了另一條磁軌,即參考軌道。 可以在此參考軌道上設置個別參考點、參考點網格或距離編碼參考點。 需要進行參考移動以參考系統。
然後計數器可以使用參考訊號將內部計數器修改為指定值。 在此過程中,計數器會識別增量訊號彼此之間的預定義位置, 這通常是 SIN = COS 且兩者都大於零,作為附加資訊 REF = "high"。 下圖顯示了反相訊號路徑,這意味著說明了訊號的負值。

Reference signal interfaces (analogue voltage)
參考訊號介面(類比電壓)
參考訊號識別
- SIN = COS 訊號關係
- 兩個訊號都大於零
- REF 訊號 = "high"
- 需要參考移動以建立位置
- 類比電壓介面:TSU/TRU/TMI
- 訊號週期:200 µm
個別參考點(Individual Reference Point)
個別參考點代表參考軌道的最簡單功能,它可以設置在標尺上的任何位置。 在 SCHNEEBERGER 中,一個參考點由三個磁性參考標記組成, 這些標記使用一個單獨的 MR 橋接器進行採樣,無需平均。 一個參考資料代表參考脈衝的上升沿,另一個代表下降沿。 第三個參考資料是冗餘的,用於提高參考點識別系統的操作可信賴性。
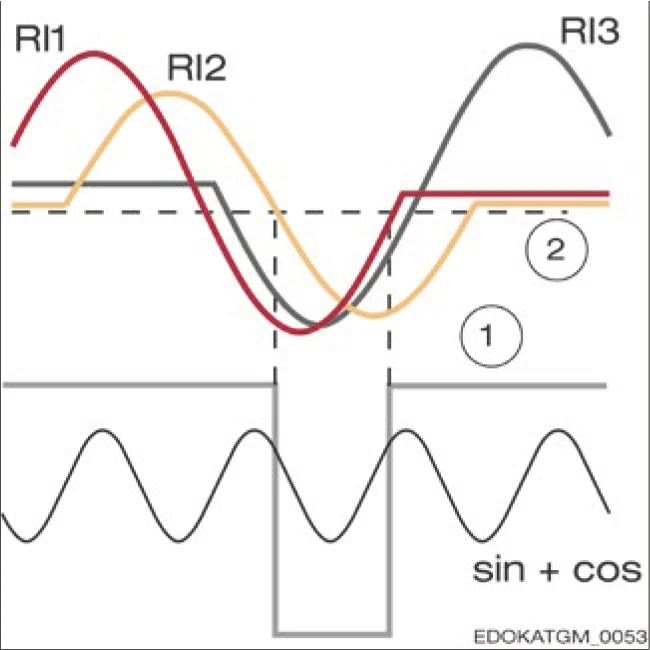
Reference point identification system
參考點識別系統
系統元件:
參考點網格(Reference Point Grid)
在參考點網格的情況下,多個參考點沿標尺以相等距離設置。 客戶從這些參考點中選擇一個用於軸的參考。
與個別參考點相比,網格的優勢首先是通過有針對性地應用外部附加元件 (凸輪、接近開關等)縮短了參考行程, 但也能夠在一個導軌上操作多個量測滑座。 為此,沿標尺的各個參考點會分配給不同的量測滑座以進行相關的參考。
相對於個別參考點的優勢
- 減少參考行程距離
- 多滑座支援能力
- 靈活的選擇選項
- 與機器自動化更好地整合
距離編碼(Distance Coding)
在距離編碼參考點的情況下,它們在標尺上的排列使得兩個參考點之間的每個間距僅出現一次。 例如,如果您在距離量測系統的導軌上越過三個參考點, 控制器就能夠計算出絕對位置。這代表了一種工業標準,受到許多控制器製造商的支援。
值 100 通常被指定為基準週期,代表在最壞情況下需要行進的距離才能完成參考。 基準週期決定了最大可編碼長度。對於短軸,選擇較小的基準週期是明智的,以減少最大必要行程距離。
因此,SCHNEEBERGER 為其 AMS 產品提供具有不同基準週期的客戶專用距離編碼參考點。
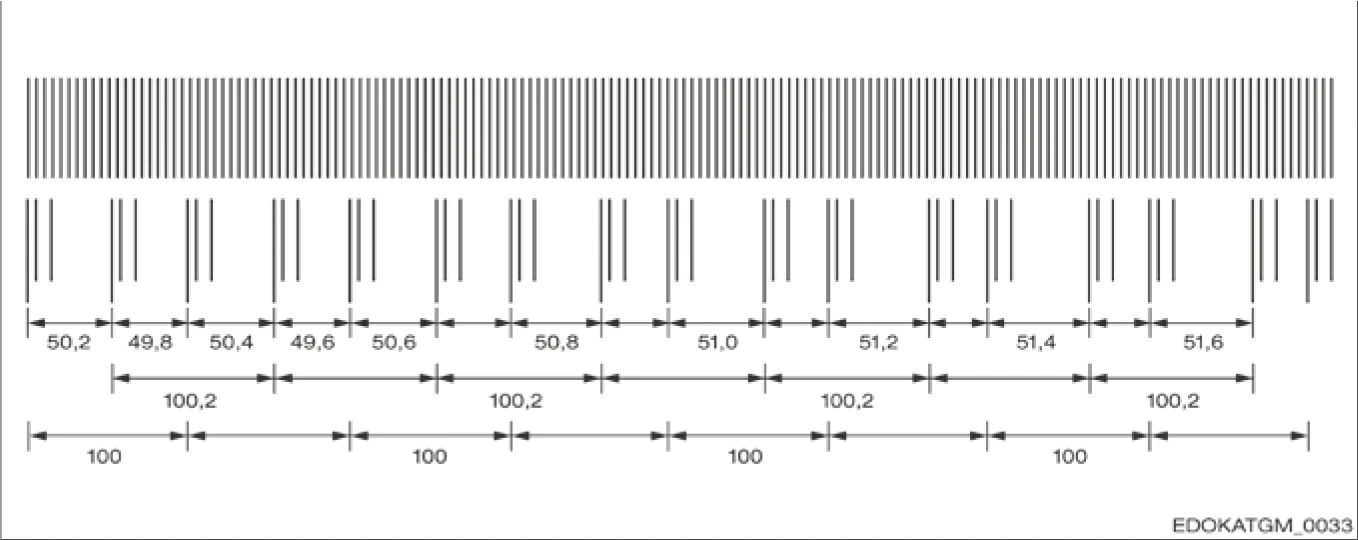
Distance coding principle diagram
距離編碼原理示意圖
絕對編碼(Absolute Coding)
對於絕對量測系統,使用具有絕對編碼的軌道代替參考軌道。 這種編碼系統要麼以串列方式施加在一條軌道上,要麼以並列方式施加在多條軌道上。 理論上,應該可以僅使用此軌道來量測距離,但由於此代碼的解析度相對較小, 絕對編碼軌道通常與增量軌道結合使用。 因此,絕對代碼定義量測系統所在的訊號週期, 該訊號週期內的精細解析度是通過內插增量訊號獲得的。
以下圖形提供了編碼系統的範例:
串列編碼 (Serial-coded)
Serial-coded interpolation track
串列編碼內插軌道
元件說明:
並列編碼 (Parallel-coded)
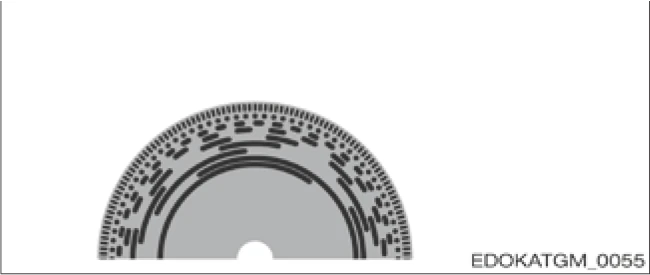
Parallel-coded pulse disc
並列編碼脈衝盤
特點:
在串列編碼軌道的情況下,只能通過比較兩個連續訊號週期來確定絕對位置。 因此,儘管事實上絕對位置是已知的,但正在使用兩種不同的程序。
一種可能性是使用感測器,這些感測器相應地較長,以便它們覆蓋必要的代碼來確定絕對位置。 因此,它們能夠在任何位置直接確定絕對位置。
另一種可能性是在雙通道基礎上建構評估電子元件。 即使在機器關閉時,其中一個通道也始終運作(電池緩衝),並確定軸的任何位置變化。 當機器開啟時,此低解析度位置資訊會與來自另一個通道的高解析度位置資訊結合,以實現正確的絕對位置。
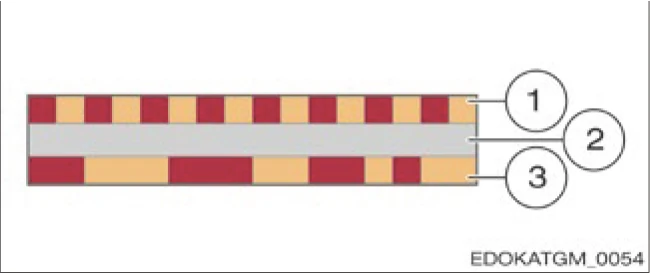
SCHNEEBERGER 使用電池緩衝掃描進行絕對位置確定。 為此目的,在導軌上施加一條特殊的距離編碼參考軌道作為絕對軌道。 量測系統在此過程中確定三個相鄰參考標記之間的距離, 並通過將確定的值與儲存的矩陣匹配來確定瞬時絕對位置。 在此範例中,讀頭經過三個標記的參考標記,並確定其間距「1」(代碼 Y)和「5」(代碼 X)。 然後可以在二維矩陣中為這兩個量測值分配絕對位置「Pos 1:5」。

Example for determining position by means of battery-buffered scanning
通過電池緩衝掃描確定位置的範例
示意圖元件:
一維距離量測偏差
One-dimensional distance measuring deviation
二維矩陣
Two-dimensional matrix
| 代碼 Y/代碼 X (Code Y/Code X) | 1 | 2 | 3 | 4 | 5 | ... |
|---|---|---|---|---|---|---|
| 1 | Pos 1;1 | Pos 1;2 | Pos 1;3 | Pos 1;4 | Pos 1;5 | ... |
| 2 | Pos 2;1 | Pos 2;2 | Pos 2;3 | Pos 2;4 | Pos 2;5 | ... |
| 3 | Pos 3;1 | Pos 3;2 | Pos 3;3 | Pos 3;4 | Pos 3;5 | ... |
| 4 | Pos 4;1 | Pos 4;2 | Pos 4;3 | Pos 4;4 | Pos 4;5 | ... |
| 5 | Pos 5;1 | Pos 5;2 | Pos 5;3 | Pos 5;4 | Pos 5;5 | ... |
| ... | ... | ... | ... | ... | ... | Pos Y;X |
為了鑑定量測標尺,SCHNEEBERGER 採用支援「VDI/VDE 2617 使用 DIN EN ISO 10360-2 檢查距離量測的準則」的程序。 在此過程中,重點在於為客戶在技術規格方面獲得最高可能的效益。 技術資料使用三種不同的距離量測偏差規格:
- 週期偏差 (Periodic deviation)
- 40 mm 路徑的距離量測偏差 (Distance measuring deviation over a 40 mm route)
- 1 m 路徑的距離量測偏差 (Distance measuring deviation over a 1 m route)
為了保障標尺的品質,建立了允許偏差的極限曲線。 極限曲線和客戶通常使用的不同參考長度的量測偏差已在圖表中列出。
因此,允許在 SCHNEEBERGER 量測系統的規格之間進行內插。
週期偏差(Periodic Deviations)
所有增量距離量測系統都伴隨著週期偏差的影響,其波長恰好對應於刻度間距或刻度間距的分數。 這種週期偏差或短波偏差是由於感測器或電訊號處理的小偏差而產生的。 正弦和餘弦訊號因此偏離數學精確形式。偏差可以根據排列(諧波)進行分類。
| KWF 週期 (KWF Period) | 偏差原因 (Deviation occurs due to) |
|---|---|
| 1 個訊號週期 (1 signal period) | 正弦/餘弦偏移 (Sine/cosine offset) |
| 1/2 訊號週期 (1/2 signal period) | 正弦和餘弦振幅不同 (Sine and cosine amplitude are different) |
| 1/3 - 1/8 訊號週期 (1/3 - 1/8 signal period) | 感測器提供的訊號與正弦波形狀基本不同 (Sensors deliver a signal fundamentally different from sine wave shape) |
內插誤差(Interpolation Error)
如果週期偏差僅在數位化和位置計算期間發生,則我們稱之為內插誤差。 在某些情況下,當發射器和接收器電路彼此不精確匹配時,這很容易發生。
比較器誤差 / Abbe 誤差(Comparator Error / Abbe Error)
比較器誤差,也稱為 Abbe 誤差,是一種系統性偏差, 當長度標準的軸與距離標準的軸不重合時發生。 偏差的原因是軸設計中的微小旋轉運動,這會影響量測結果。
絕對位置確定方法總結
1. 基於感測器的方法:
- 長感測器覆蓋必要的代碼
- 直接確定絕對位置
- 無需順序週期比較
2. 雙通道電池緩衝方法:
- 一個通道始終運作(電池緩衝)
- 第二個通道在供電時高解析度
- 機器關機時位置追蹤能力
- 在機器啟動時結合低解析度和高解析度
