直線驅動優勢
性能
- 無需運動轉換
- 驅動系統不存在因傳動或耦合元件引起的彈性、背隙、摩擦和遲滯。
- 緊湊型電機
- 得益於大的進給力與相對低的加速質量,可實現極高的加速性能。從速度 0 到極限速度全範圍均可使用。
- 直接位置量測
- 透過直接位置量測和剛性機械結構,定位過程具有高度動態性與精確性。
運營成本
- 無額外運動部件
- 驅動組件的組裝、調整和維護工作大幅減少。
- 驅動系統無磨損
- 即使在高交變負載下,驅動系統也極為耐用。機器停機時間因此大幅降低。
- 高可用性
- 除了延長使用壽命和減少磨損外,線性馬達的堅固性也提升了系統可用性。
- 驅動系統中的機械過載不會像齒輪電機那樣造成損壞。
設計
- 緊湊的安裝空間
- 緊湊的設計使驅動模組的空間需求降低。
- 零件數量少
- 成熟的設計有利於將電機零件整合到整體機器概念中。
- 更少且更堅固的零件帶來低故障率(高 MTBF*)。
- 多樣化設計變體
- 有助於將電機零件優化整合到整體機器設計概念中。
*MTBF:Mean Time Between Failures(平均故障間隔時間)
線性馬達特性
直線驅動可在無需運動轉換器或中間齒輪的情況下實現線性運動。
線性馬達由動子(primary part)和定子(secondary part)組成。動子包含繞組線圈,定子為一組排列在動子對面的永久磁鐵。電機類型可分為有齒槽型(slotted)、無齒槽型(slotless)和無鐵芯型(ironless),以及步進電機(同步磁阻混合電機)。
電機在特定速度範圍內產生均勻且典型的力。力的大小由動子和定子之間的有效氣隙面積決定。
當電流施加到動子時,繞組線圈周圍的電磁場產生作用於定子的力,從而產生線性運動。
線性軸系統需要合適的導引系統來維持動子與定子之間的氣隙,同時需要一個線性量測系統來偵測電機的位置。
每個電機系列都包含不同長度和寬度的選擇,以滿足不同的力和安裝需求,並提供多種安裝和連接變體。
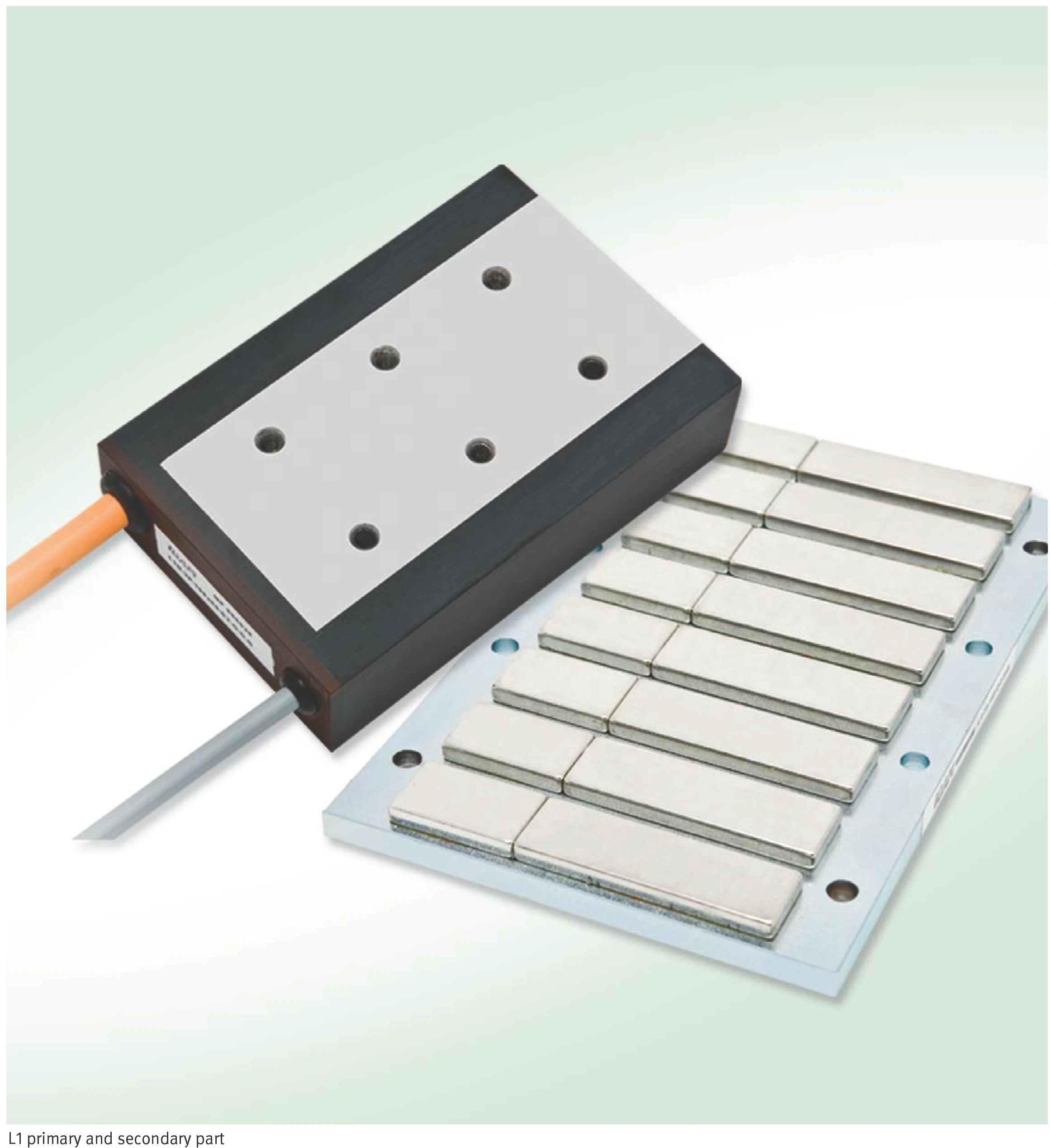
L1 線性馬達:動子與定子
線性馬達系列概覽
有齒槽型電機(Slotted Motors)
| 電機類型 | 特性 |
|---|---|
| L1A 系列 | 峰值力高達 1010 N|極致力重比|適用於垂直安裝空間有限的自動化應用 |
| L1B 系列 | 峰值力高達 1521 N|最佳化的熱損耗|適用於進給力需求較高的自動化應用 |
| L1C 系列 | 峰值力高達 5171 N|最佳化的熱損耗|水冷|適用於工具機等應用 |
| L2U 系列 | 峰值力高達 12000 N|雙齒梳結構|極致力體積比|長使用壽命 / 高動態性能|冷卻選項|恆速|磁吸力中和|適用於工具機等應用 |
低鐵芯型電機 / 無齒槽型(Low-Iron Motors, Slotless)
| 電機類型 | 特性 |
|---|---|
| FSM 系列 | 扁平設計|最小化脈動力|高動態性能和高精度|適用於量測機台等應用 |
無鐵芯型電機(Ironless Motors)
| 電機類型 | 特性 |
|---|---|
| ULIM 系列 | 優異的動態性能|恆速|緊湊設計|適用於印刷機和產品電子等應用 |
磁阻電機(Reluctance Motors)
| 電機類型 | 特性 |
|---|---|
| LRAM | 步進電機|無磨損|精密空氣軸承|適用於產品電子中的取放應用|適合低質量應用 |
電機參數 — 效率準則
根據電機尺寸,力和製程中產生的功率損耗(銅損)在不同工作點上是固定的,且與繞組設計無關。由於線性馬達在靜止狀態下不輸出機械功率,在此引用效率係數並無意義。
功率損耗公式
電流轉換為保持力或進給力時,會產生與負載無關電流之二次方成正比的功率損耗或加熱。此關係在線性動態範圍和室溫下的靜態工作中成立。
Pl = (F / km)2
- Pl:功率損耗 [W]
- F:力 [N]
- km:電機常數 [N/√W]
電機常數 km 可作為比較不同電機效率的方式。較高的電機常數代表力對功率損耗的轉換效率更高。
km 與溫度的關係
電機常數 km 取決於歐姆電阻,因此也取決於電機的繞組溫度。在電機技術資料中,km 以 25 °C 為參考值。
下圖顯示了參考電機常數與溫度之間的依賴關係:繞組溫度 100 °C 時,km 約降至 25 °C 時的 88%。
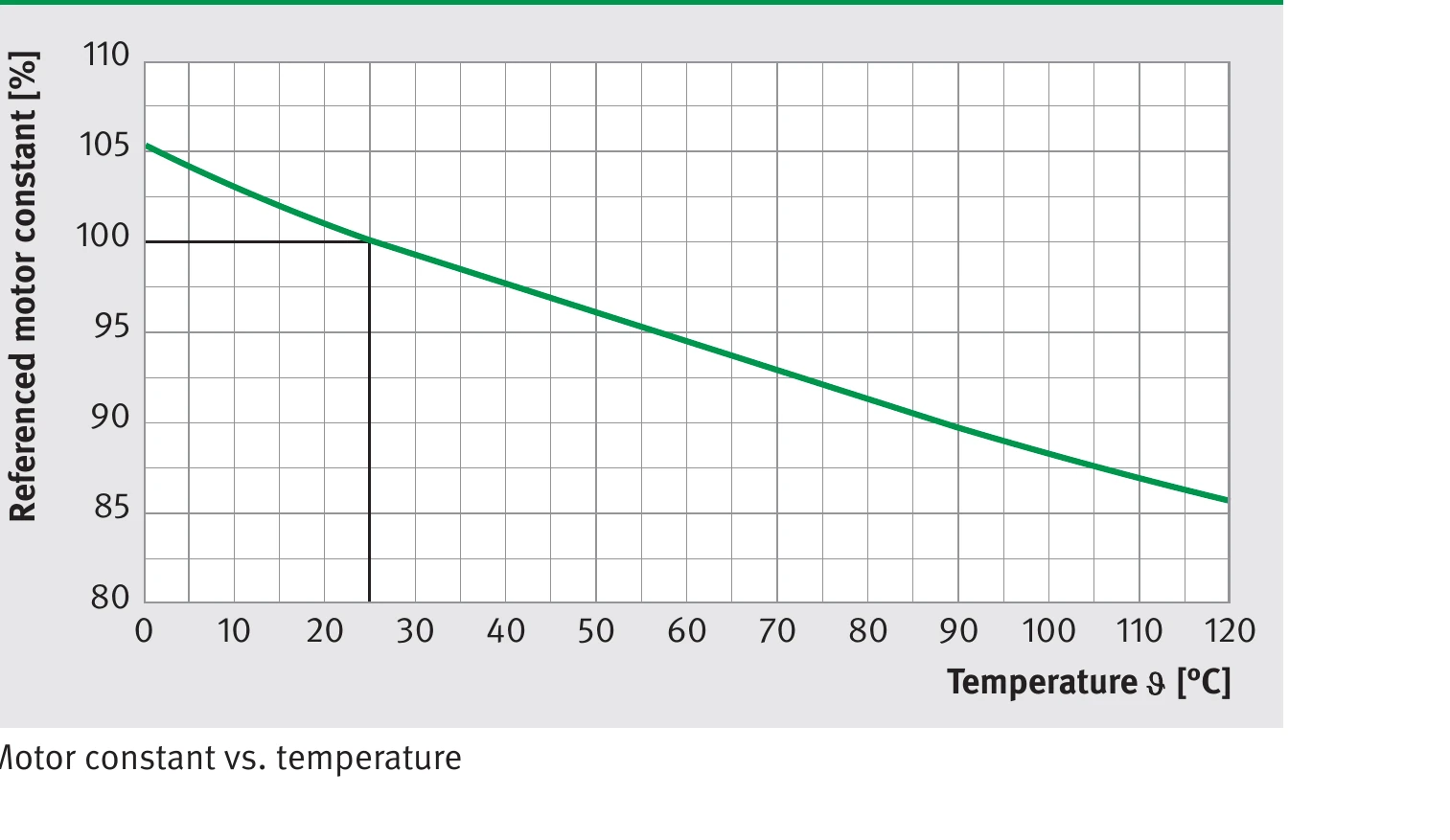
電機常數 km 隨溫度變化的依賴關係(以 25 °C 為 100% 參考值)
高速注意事項
隨著速度增加,功率損耗 Pl 還會受到與頻率相關的磁反轉損耗和渦流損耗的補充,這些損耗不包含在電機常數 km 中,但在極限速度範圍內變得顯著,需納入考量。電機常數 km 僅適用於力-電流特性的線性區域。
繞組設計與依存性
任何線性馬達的可達極限速度在很大程度上取決於繞組設計和直流母線電壓(UDCL)。電機內部電壓降隨速度增加而上升。在指定的極限速度下,面向磁場控制的電壓需求對應伺服轉換器的母線電壓。超過此點後,速度會急速下降。
母線電壓越高,繞組相關的電壓常數(ku)越小,可達到的極限速度就越高。由於電壓常數和力常數之間的關聯性,力常數在較高速度下會隨著相同力的電流需求增加而增大。
繞組變體
對於繞組資料,每種電機尺寸都預先定義了標準繞組 WM(適用於中等動態需求)。如需較低或較高的動態需求,可另外提供繞組變體 WL 和 WH。
- WL:低動態需求(較低母線電壓下的極限速度幾乎按比例降低)
- WM:標準動態需求(預設繞組)
- WH:高動態需求
力-電流特性描述了不同工作點下的力。力-速度特性則呈現了不同工作點下力與速度之間的關係。
L1 線性馬達系列
力-速度特性
永磁同步電機的 F(v) 特性在低速段幾乎與速度無關。這適用於 Fp、Fcw 和 Fc 直到其對應的轉折速度 vlp、vlcw 和 vlc。在較高速度下,由於反電動勢(Back EMF*)的影響,力逐步降低,最終降至零。
透過更高的母線電壓可以補償更大的反電動勢,從而達到更高的速度。
工作條件
電機可在 F(v) 特性曲線下方的任意工作點運行:
- 在無冷卻連續運行中,力最高可達 Fc
- 在水冷連續運行中,力最高可達 Fcw
- 在週期性間歇運行(S3**)中,力最高可達 Fp
閉迴路控制的電機運動需要在潛在工作點與 F(v) 特性的下降段之間保持適當的距離。通常應保留約 0.2 倍最大速度的距離作為控制餘裕。
v = 0 m/s 時的力
在靜止狀態下使用連續力(Fs)時(例如 Z 軸無質量補償),需注意最大只能使用 70% 的額定力。超過此降額值可能導致電機局部過載。
Fs = 0.7 × Fc(或 Fcw)
*Back EMF:反電動勢(Back Electromagnetic Force)
**S3:依據 VDE 0530 標準的運行模式
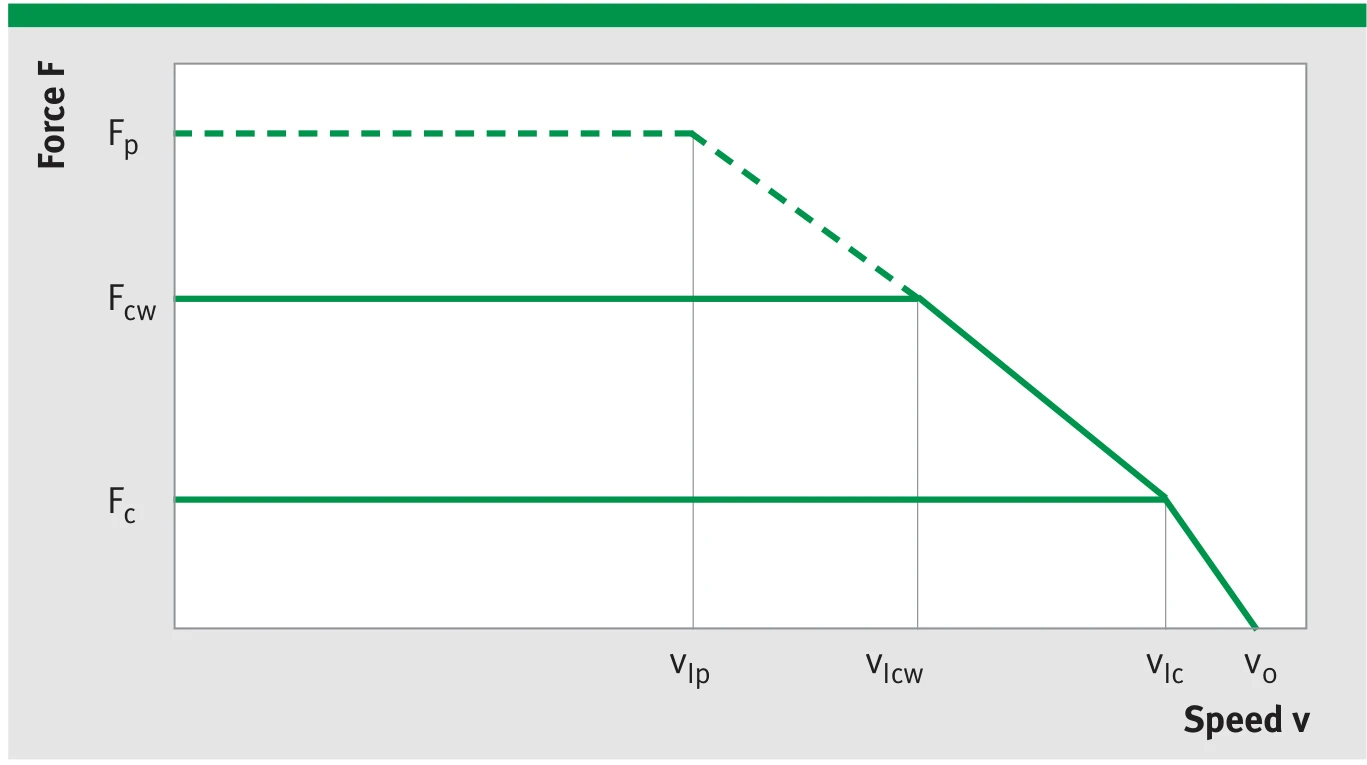
力-速度(F-v)特性曲線:Fp(峰值力)、Fcw(水冷連續力)、Fc(無冷卻連續力)與對應轉折速度
力-電流特性
從原點 (0,0) 到 (Fpl, Ipl) 的特性曲線近似線性段,由力常數 kf 定義:
F = I × kf
無冷卻運行的工作點 (Fc, Ic) 和水冷運行的工作點 (Fcw, Icw) 皆落在此線性區域內。
飽和區域
在大電流下,力-電流特性的非線性來自電機磁路的飽和。此段曲線在資料表和圖中以力-電流工作點 (Fp, Ip) 和 (Fu, Iu) 描述,其斜率比 kf 平坦得多。
電機可在短時間內(週期性地持續 ≤3 秒)運行到工作點 (Fp, Ip),前提是平均熱損耗已被納入考量。對於加速過程,這是應使用的最大工作點。
極限點 (Fu, Iu)
極限點絕不可被超越,否則存在電機過載的風險。此點僅用於短路制動的考量,不可作為選型依據。
所有參數均在詞彙表中說明。
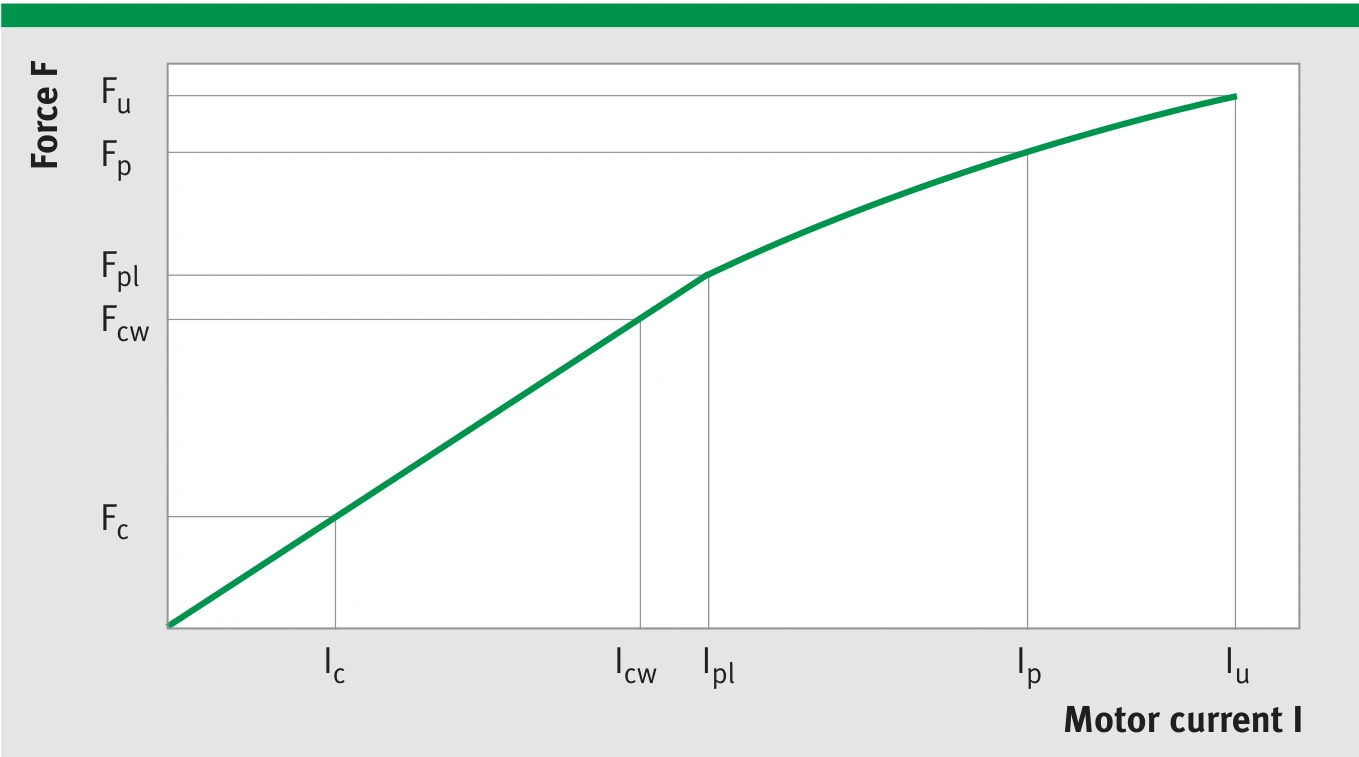
力-電流(F-I)特性曲線:線性區域(由 kf 定義)與飽和區域(Fp/Fu 工作點)
熱保護
直線驅動器經常在其熱性能極限附近運行。此外,運行中可能發生不可預見的過載,導致電流超過允許的額定電流。因此,電機的伺服控制器通常應配備過載保護,以控制電機電流。這裡需要確保電機電流的有效值(均方根值)僅允許在短時間內超過容許的額定電流。這種間接溫度監控既快速又可靠。
IDAM 電機配備有溫度感測器(PTC 和 KTY),可用於熱保護。
監控迴路 I — PTC 感測器
三個相繞組各配備一個串聯連接的 PTC(正溫度係數熱敏電阻),以確保電機保護。PTC 是一種正溫度係數的熱敏電阻,安裝後其熱時間常數低於 5 秒。
PTC 工作原理
當額定響應溫度 Tn 被超過時,PTC 的電阻會急劇上升,增加到冷態值的數倍。三個 PTC 元件串聯連接後,即使只有一個元件超過 Tn,整體電阻也會出現明顯變化。
使用三個感測器可確保即使電機在靜止狀態下存在不對稱的相負載,也能發出安全關斷信號。
市售的電機保護跳脫裝置連接在下游,通常在 1.5 kΩ 至 3.5 kΩ 之間觸發。如此,過溫可被偵測到每個繞組幾度的精度範圍內。
跳脫裝置在 PTC 電路電阻過低時也會反應,這通常表示監控電路存在缺陷。同時確保了控制器與電機感測器之間的電氣隔離。電機保護跳脫裝置不包含在供貨範圍內。
原則:PTC 感測器訊號必須被監控,以保護電機免於過溫損壞。
PTC 不適用於溫度量測。如需溫度量測功能,應使用 KTY 感測器。
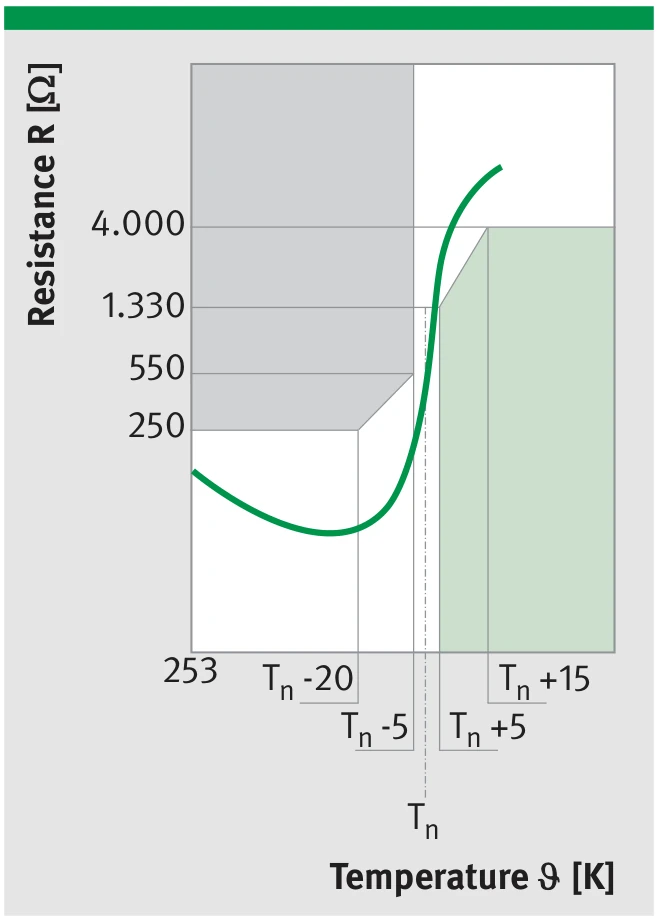
PTC 感測器電阻-溫度特性:超過額定響應溫度 Tn 後電阻急劇上升
監控迴路 II — KTY84-130 感測器
電機的其中一相上額外配備一個 KTY84-130 感測器。這是一種具有正溫度係數的半導體電阻,會產生與溫度等效的訊號(帶有延遲,延遲取決於電機類型)。
為了保護電機免於過溫,控制器中會設定一個關斷限值。當電機靜止時,恆定電流流過繞組,電流大小取決於各自的極位置。因此,電機不會均勻發熱,可能導致未受監控的繞組過熱。
KTY 感測器用途
KTY 感測器監控單一繞組。其訊號可用於觀察溫度或發出警告。不允許單獨使用 KTY 作為關斷依據。
Imax = 2 mA
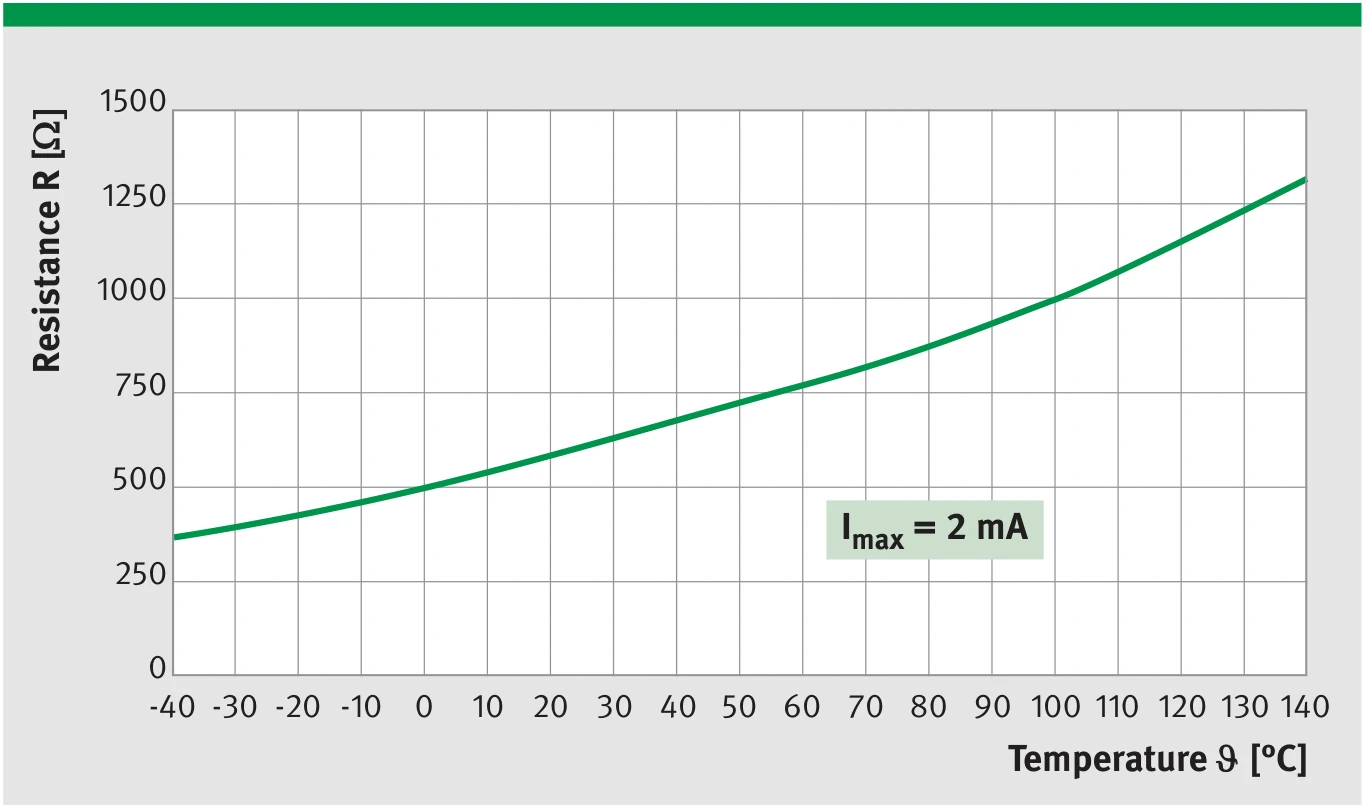
KTY84-130 感測器電阻-溫度特性:線性正溫度係數,可精確量測繞組溫度
PTC 與 KTY 標準接線
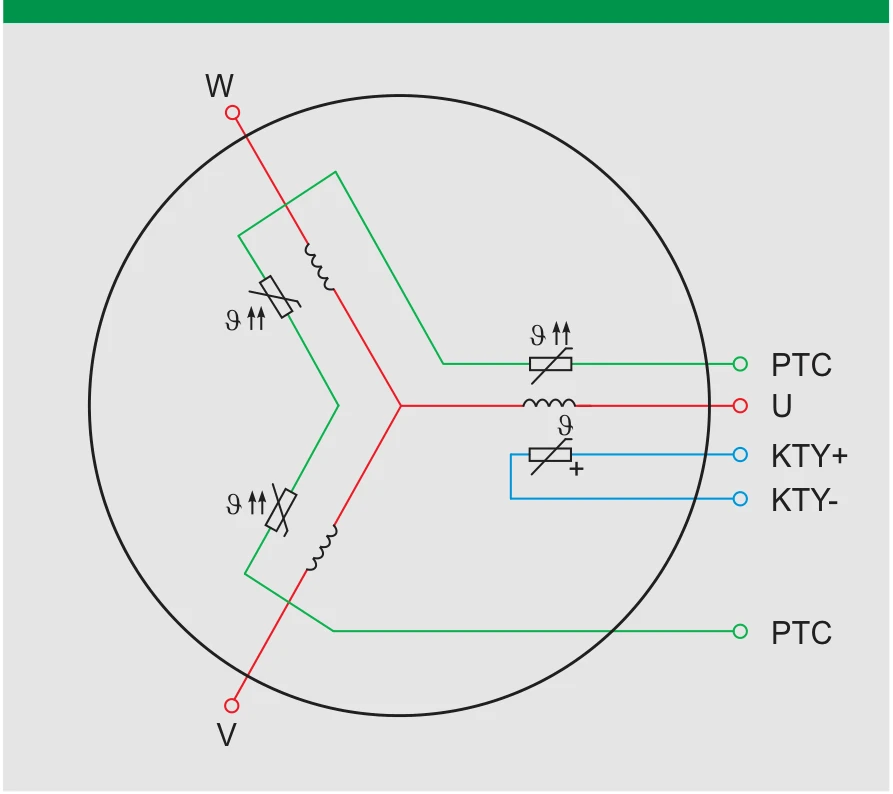
PTC 與 KTY 標準接線:PTC 感測器串聯嵌入三相繞組,KTY 感測器連接單相繞組
PTC 和 KTY 感測器具有基本的絕緣保護,不適合直接連接到 PELV/SELV 電路(依據 DIN EN 50178 標準)。
可依客戶要求整合更多的監控感測器。
電氣連接
IDAM 電機的標準連接從端面引出。標準電纜長度從電纜引出電機處起為 1000 mm。可依要求提供不同長度。電源線的截面積取決於連續電機電流,並記錄在型錄圖面中。標準情況下,L1A 和 L1B 的尺寸按自然冷卻連續電流 Ic 在功率損耗 Pl 下設計,L1C 則按水冷連續電流 Icw 在功率損耗 Plcw 下設計。
電機電纜截面積從 4G0.75 mm² 起。感測器電纜 4 × 0.14 mm²(d = 5.1 mm)可透過 PTC 和 KTY 進行溫度監控。線端為開放式,附有端子套。使用的電纜為 UL 認證,適用於拖鏈。
帶端子的電機版本(WAGO 系列 236 型端子排,適用於最大 1.5 mm² 線徑)可作為帶端套的替代方案。電纜出口或端子的位置標示在資料表中。對於無水冷且連續電流不超過 16 A 的變體,端子的使用不受限制。
端子分配
電機端子
| 線芯 | 端子號 | 功能 |
|---|---|---|
| U | 1 | Phase U |
| VV | 2 | Phase V |
| WWW | 3 | Phase W |
| GNYE | 4 | PE(保護接地) |
| BK | — | 屏蔽 |
感測器端子
| 線芯 | 端子號 | 功能 |
|---|---|---|
| WH | 7 | PTC |
| BN | 8 | PTC |
| GN | 5 | + KTY |
| YE | 6 | - KTY |
正運動方向
所有三相電機中,電氣正運動方向對應右旋磁場,即相電壓依序以 U、V、W 的順序感應。在 IDAM 電機上,正運動方向為:
- 朝向無電纜一側的方向(電纜版本)
- 朝向無端子一側的方向(端子版本)
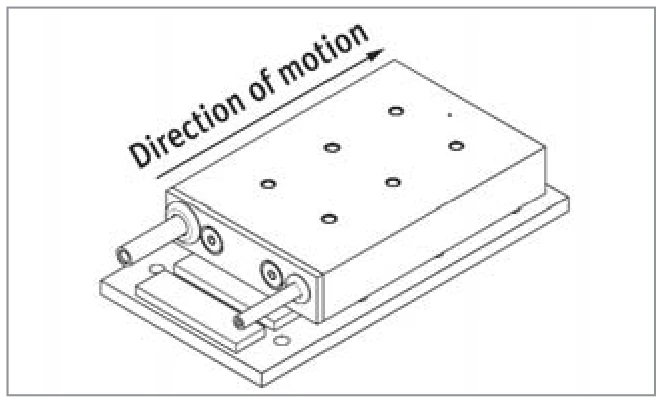
電纜版:正方向為朝向無電纜一側
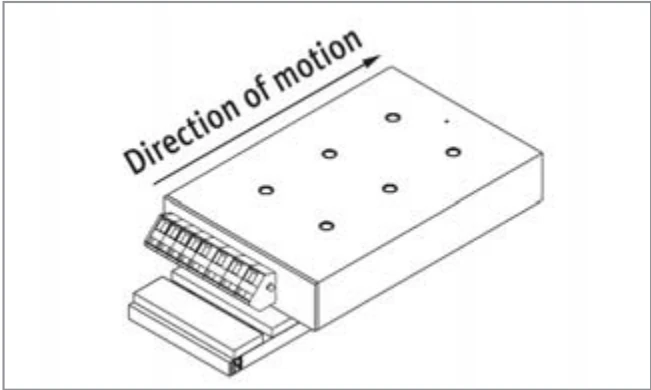
端子版:正方向為朝向無端子一側
電機電纜選型
| 連續電流 I [A] | 電纜截面積 [mm²] | 直徑 dk [mm] | 動態彎曲半徑 rd [mm] | 靜態彎曲半徑 rs [mm] |
|---|---|---|---|---|
| ≤9 | 0.75 | 7.3 | 73 | 44 |
| ≤16 | 1.5 | 10 | 100 | 60 |
| ≤22 | 2.5 | 11.6 | 120 | 70 |
換向
同步電機較佳的運行方式是換向運行。IDAM 線性馬達標準上不配備 Hall 感測器。IDAM 建議使用量測系統進行換向。
換向方式
同步電機透過量測系統(如光學尺)偵測轉子位置,並依此控制相電流的切換時序。相較於 Hall 感測器的六步換向,量測系統換向可實現更平滑的正弦波電流控制,帶來更低的力脈動和更高的定位精度。
絕緣電阻
母線電壓不超過 600 VDC 的絕緣電阻
IDAM 電機符合 EC 指令 73/23/EEC 以及歐洲標準 EN 50178 和 EN 60204。出貨前經過分級高壓測試,並在真空中灌封。
請確保遵守電機的額定工作電壓。
變頻器運行時的電機端子過電壓
由於極快速切換的功率半導體產生高 du/dt 負載,電機端子處可能出現明顯高於實際變頻器電壓的電壓尖峰,尤其是在使用較長的連接電纜(5 m 以上)時。這對電機絕緣造成很高的負載。
PWM 模組的 du/dt 值不得超過 8 kV/µs。電機連接電纜應盡量縮短。
為了保護電機,建議始終使用示波器以特定配置量測施加到電機繞組相對於 PE 的變頻器電壓(PWM)。現有的電壓尖峰不應顯著超過 1 kV。從約 2 kV 起,應預期絕緣會逐漸損壞。
IDAM 工程師將協助您確定應用方案並降低過高電壓。
請遵守變頻器製造商提供的建議和配置說明。
冷卻與冷卻迴路
功率損耗與熱損耗
除了電機常數 km 定義的功率損耗外,電機在較高控制頻率(50 Hz 以上)下還會受到與頻率相關的損耗影響。這些損耗共同導致電機和其他系統組件升溫。
以下規則適用於低控制頻率(<80 Hz):具有較高電機常數 km 的電機相對於具有較低 km 的可比電機,會產生更低的功率損耗。
運行期間產生的功率損耗透過電機總成傳遞到相連的元件。整個系統經過精心設計,以控制熱量分配方式,透過對流、傳導和輻射來控制。
對於 L1C 電機,可選配冷卻系統作為附件來改善散熱。液冷電機的連續力約為非冷卻電機的兩倍。
主動冷卻
主動冷卻應優先用於高性能和高動態運行的機器,以及對應的高軸承負載場合。
如果需要電機和機器之間完全的熱隔離(例如高精度機械中防止熱變形),則需要額外的隔熱層與精密冷卻。實際冷卻即為主冷卻或功率冷卻系統。
冷卻板
電機冷卻系統以冷卻板形式實現,安裝在電機與機台之間,應由客戶連接到冷卻裝置的冷卻迴路中。隔熱層和冷卻板可作為電機零件的選配件供應,或作為客戶機器設計的一部分。
冷卻介質透過內部銅管從進口流經出口。進出口連接可分配到兩個水口,連接口為 G 1/8 內螺紋。
使用水作為冷卻劑時,必須添加防腐蝕和防生物沉積的添加劑。
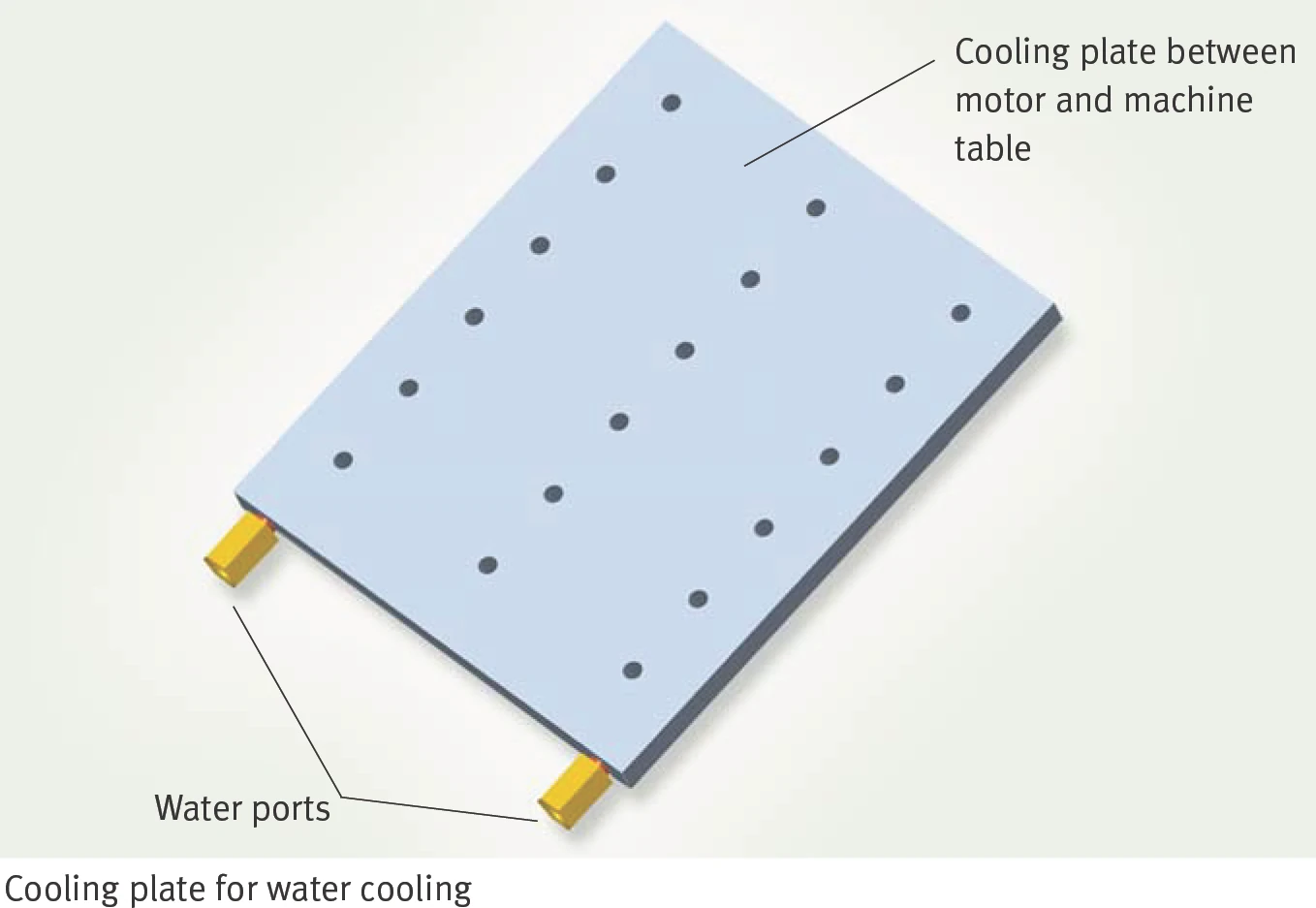
水冷用冷卻板
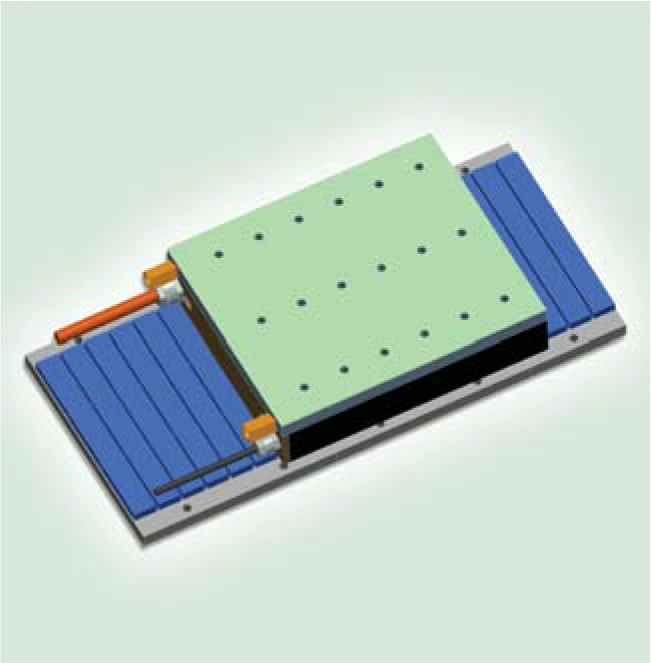
冷卻板安裝於電機與機台之間
冷卻介質溫度依存性
資料表中標示的水冷連續電流 Icw 是在額定供水溫度 θnV = 25 °C 下可達到的值。較高的供水溫度 θV 會降低冷卻性能,從而降低額定電流。
降額後的連續電流 Ic red 可由以下二次方程式計算:
Ic red / Icw = √((θmax − θV) / (θmax − θnV))
- Ic red:降額連續電流 [A]
- Icw:額定水冷連續電流(在 θnV 下)[A]
- θV:實際供水溫度 [°C]
- θnV:額定供水溫度 [°C]
- θmax:最大允許繞組溫度 [°C]
(適用於恆定電機電流條件下)
L1C 接線端子型電機
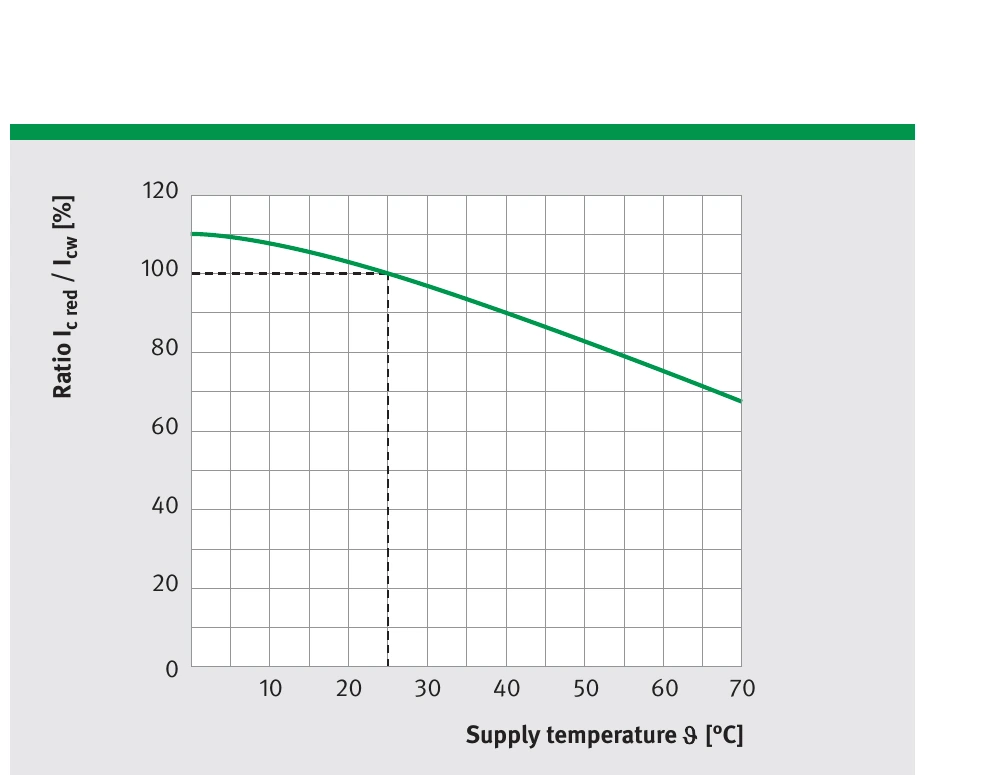
相對連續電流 Ic red / Icw 對供水溫度 θV 特性曲線(θnV = 25 °C)
直線直驅馬達選型
週期性應用
在週期性運行中,連續的定位移動與暫停交替進行。簡單的定位序列採用正加速運動形式,隨後是通常等量值的減速(負加速度),此時加速和減速時間相等。最大速度 vmax 在加速階段結束時達到。
一個週期在 v(t) 圖中描述(v:速度,t:時間)。圖示為帶暫停的前進-後退運動(tM:運動時間,tP:無負載停留時間)。
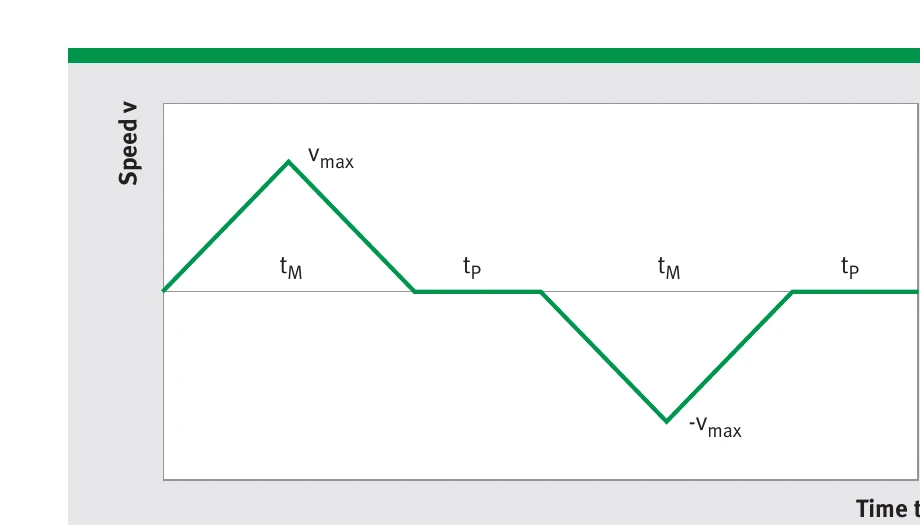
週期性運行的 v-t 圖(速度-時間圖)
由此可得出 a(t) 圖(加速度-時間圖)以及運動所需的力曲線:
F = m × a
- F:力 [N]
- m:質量 [kg]
- a:加速度 [m/s²]
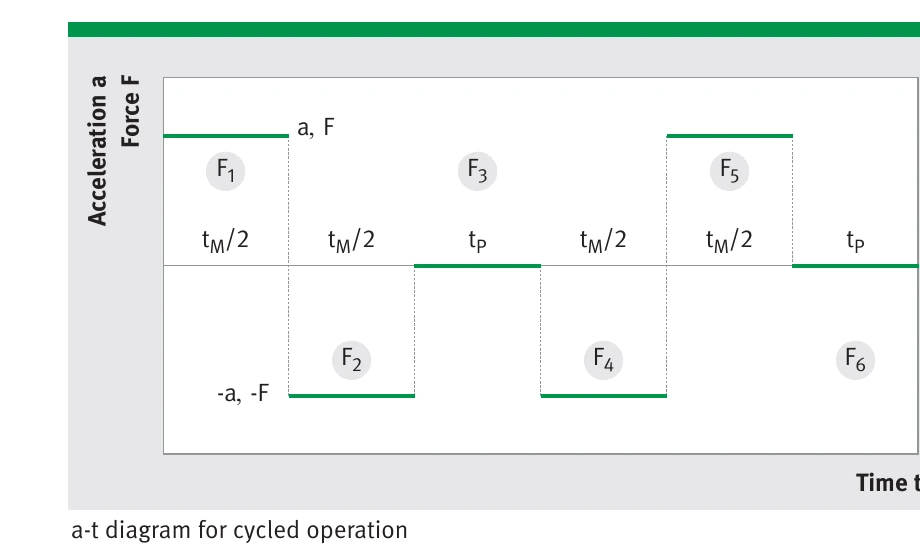
週期性運行的 a(t) 圖(加速度/力-時間圖)
選型三準則
電機依據以下三個準則選擇,需符合所需週期的力曲線:
- 最大力:週期內最大力 ≤ Fp(依資料表)
- 有效力:週期內有效力 ≤ Fc(非冷卻)或 Fcw(水冷),依資料表
- 最大速度:週期內最大速度 ≤ vlp(依資料表)
有效力計算
有效力等於週期內力曲線的均方根值(以下示例含六個力段):
Feff = √( (F1²·t1 + F2²·t2 + … + F6²·t6) / (t1 + t2 + … + t6) )
代入各段力與時間(F1 = F、F2 = −F、F3 = 0、F4 = −F、F5 = F、F6 = 0;t1 = tM/2、t2 = tM/2、t3 = tP、t4 = tM/2、t5 = tM/2、t6 = tP),可化簡為:
Feff = F · √( tM / (tM + tP) )
此公式僅適用於所有作用力大小相同(質量與加速度均為常數)的情況。分母為週期時間(運動時間 + 暫停時間)。
範例計算(第 19 頁)中安全係數 1.4 亦包含電機在力-電流特性非線性區域工作的考量,此時 Feff 公式僅為近似值。
定位運動的加速度與最大速度
a = 4 · x / tM²
vmax = 2 · x / tM
- x:總行程 [m]
- tM:運動時間 [s]
- a:加速度 [m/s²]
- vmax:最大速度 [m/s]
以上定位運動採用理論上無限大的加加速度(jerk)。若伺服驅動器中設定了加加速度限制,定位時間會相應延長;此情況下需要更大的加速度以維持相同的定位時間不變。
週期性應用計算範例
| 預設值 | 計算結果 | ||
|---|---|---|---|
| 總行程 | x = 0.7 m | 最大速度 | vmax = 2 × 0.7 / 0.3 = 4.67 m/s |
| 質量 | m = 10 kg | 加速度 | a = 4 × 0.7 / 0.3² = 31.1 m/s² |
| 運動時間 | tM = 0.3 s | 最大力 | Fmax = (10 kg × 31.1 m/s² + 5 N) × 1.4 = 442.4 N |
| 摩擦力 | Ff = 5 N | 有效力 | Feff = (10 kg × 31.1 m/s² × √(0.3/1.3) + 5 N) × 1.4 = 216.2 N |
| 週期時間 | tcyc = 1.3 s | ||
| 安全係數 | 1.4 | ||
非水冷電機選型
條件:Fmax ≤ Fp 且 Feff ≤ Fc
✓ L1A-3P-200-75-WM
直流鏈路電壓 600 V 可達到所需速度。
水冷電機選型
條件:Fmax ≤ Fp 且 Feff ≤ Fcw
✓ L1C-3P-100-75-WM
冷卻板增加約 500 g 質量(已計入)。直流鏈路電壓 600 V 可達到所需速度。
